價(jià)功能介紹")
會(huì)員登錄/注冊



步進(jìn)電動(dòng)機(jī)
5相步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)器
CVD系列 全閉環(huán)控制型

步進(jìn)電動(dòng)機(jī)的全閉環(huán)控制
在開始定位時(shí),利用步進(jìn)電動(dòng)機(jī)的高響應(yīng)進(jìn)行開環(huán)控制,從位置指令結(jié)束開始,使用外部傳感器的反饋,通過全閉環(huán)控制進(jìn)行位置修正。

實(shí)現(xiàn)高精度定位
通過直接反饋機(jī)構(gòu)位置的全閉環(huán)控制,修正檢測位置相對于指令位置的差分(偏差)。
有助于亞微米以內(nèi)需要高精度定位的裝置設(shè)計(jì)。




*點(diǎn)擊相應(yīng)品牌查看傳感器詳情
*排名不分先后
是大連榕樹光學(xué)有限公司的注冊商標(biāo)或商標(biāo)
有助于亞微米以內(nèi)需要高精度定位的裝置設(shè)計(jì)。
參考 實(shí)測數(shù)據(jù)
● 空程※1實(shí)測數(shù)據(jù) |
【測定條件】 螺桿導(dǎo)程1mm 直線光柵尺分辨率0.1μm 位置范圍:1cnt ※2 采用激光測長測量
|
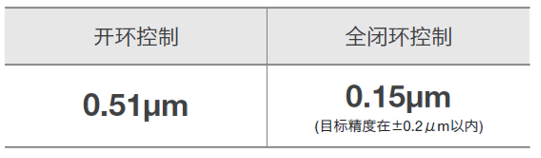 |
※1 電動(dòng)機(jī)從CW或CCW方向?qū)δ繕?biāo)位置進(jìn)行定位,此時(shí)的停止位置相對于旋轉(zhuǎn)方向的差。
※2 以編碼器脈沖計(jì)數(shù)1的誤差(-0.2~0.2μm)為目標(biāo)進(jìn)行修正。
● 直線光柵尺的分辨率

※2 以編碼器脈沖計(jì)數(shù)1的誤差(-0.2~0.2μm)為目標(biāo)進(jìn)行修正。
● 直線光柵尺的分辨率
由于是步進(jìn)電動(dòng)機(jī),故無需增益調(diào)整·無微振
無需增益調(diào)整
無需像伺服電動(dòng)機(jī)那樣根據(jù)機(jī)構(gòu)進(jìn)行增益調(diào)整。
由于始終不進(jìn)行利用編碼器反饋的定位運(yùn)行,因此無需根據(jù)皮帶輪和凸輪等機(jī)構(gòu)及負(fù)載進(jìn)行調(diào)整。
保持停止位置,無微振
定位結(jié)束時(shí)無微振且可以通過電動(dòng)機(jī)自身保持力停止。適用于需要無振動(dòng)停止的設(shè)備用途。
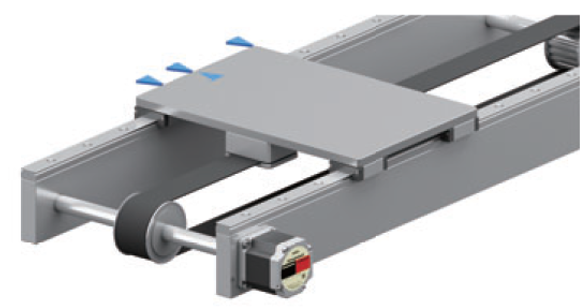
即便是皮帶輪也無需增益調(diào)整,就能實(shí)現(xiàn)高精度定位
無需像伺服電動(dòng)機(jī)那樣根據(jù)機(jī)構(gòu)進(jìn)行增益調(diào)整。
由于始終不進(jìn)行利用編碼器反饋的定位運(yùn)行,因此無需根據(jù)皮帶輪和凸輪等機(jī)構(gòu)及負(fù)載進(jìn)行調(diào)整。
保持停止位置,無微振
定位結(jié)束時(shí)無微振且可以通過電動(dòng)機(jī)自身保持力停止。適用于需要無振動(dòng)停止的設(shè)備用途。
即便是皮帶輪也無需增益調(diào)整,就能實(shí)現(xiàn)高精度定位
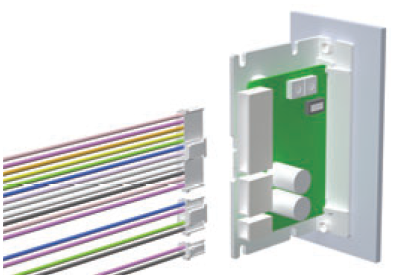
可自由搭配光柵尺和傳感器
可使用不同品牌不同種類的的光柵尺/傳感器。
*點(diǎn)擊相應(yīng)品牌查看傳感器詳情
*排名不分先后
*
是大連榕樹光學(xué)有限公司的注冊商標(biāo)或商標(biāo)
*是雷尼紹有限公司的注冊商標(biāo)或商標(biāo)
是雷尼紹有限公司的注冊商標(biāo)或商標(biāo)
*是Mitutoyo Corporation的注冊商標(biāo)或商標(biāo)
通用的驅(qū)動(dòng)器尺寸和安裝方法
備有符合用戶驅(qū)動(dòng)器安裝方法的形狀、連接器朝向不同的驅(qū)動(dòng)器。
使用與其他CVD系列相同的安裝板,因此安裝孔間距相同。

使用與其他CVD系列相同的安裝板,因此安裝孔間距相同。
|
安裝例:將驅(qū)動(dòng)器垂直安裝 相對于基板,連接器的朝向是橫 向。本公司備有DIN導(dǎo)軌安裝底 座及電路產(chǎn)品外罩作為選購配 件。 |
 |
|
安裝例:將驅(qū)動(dòng)器水平安裝 相對于基板,連接器的朝向朝上。 |
 |