
會員登錄/注冊



搬送機器人的解決方案

隨著對“工作物搬送作業”的自動化及省人力需求的不斷提升,機器人搬送(AGV/AMR/GTP※)正作為解決方案被導入。
無刷電動機BLV/BLH系列可實現電池驅動,因此可用于搬送機器人的車軸或搭載于搬送裝置。
有助于應對各類的現場所需求的多種多樣的行車模式及搬送物。
※AGV:Automatic Guided Vehicle.AMR:Autonomous Mobile Robot.GTP:Goods To Person
無刷電動機BLV/BLH系列可實現電池驅動,因此可用于搬送機器人的車軸或搭載于搬送裝置。
有助于應對各類的現場所需求的多種多樣的行車模式及搬送物。
※AGV:Automatic Guided Vehicle.AMR:Autonomous Mobile Robot.GTP:Goods To Person
低底盤·細長設計 :適應各種貨物形狀及場所的機身

停止位置的設定?微調整 : 與前后工程順暢協作
希望進入貨架、搬運架底部,進行自動搬送:低底盤設計
低底盤型的搬送機器人可進入產品·部件貨架、搬運架底部,將其升起(或卡住),有效實現搬送作業的自動化。電動機安裝可選擇朝天安裝或側面安裝,使得設計自由度增加,從而有助于低底盤設計。
朝天安裝 法蘭輸出頭
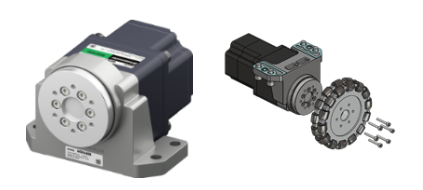 |
側面安裝 中空軸扁平減速機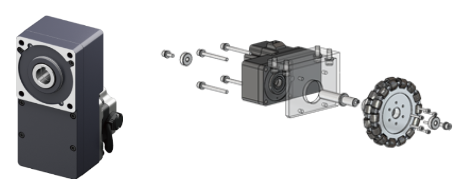
|
窄路也希望能同時行駛:細長化
通過使用中空軸扁平減速機,并交錯安裝,實現減少車身寬度的細長設計。因此窄路也能同時行駛。從而減少了搬送機器人的等待時間、有助于提高效率。
更低底盤·細長化
●小型?薄型驅動器
因為是小型尺寸,電池、控制機器的設置自由度更大。

●電氣制動※
停止時可通過電氣制動保持停止位置,因此無需機械制動(電磁制動)。
因為電動機全長短,可實現縮減車身的設計。
※僅通電時有效。
●小型?薄型驅動器
因為是小型尺寸,電池、控制機器的設置自由度更大。
●電氣制動※
停止時可通過電氣制動保持停止位置,因此無需機械制動(電磁制動)。
因為電動機全長短,可實現縮減車身的設計。
※僅通電時有效。
高負載性能:應對工作物的大型化、搭載機器人或傳送帶
搬送機器人負載性能受到容許徑向負載的影響。安裝法蘭輸出頭時為1500N(153kgf),中空軸扁平減速機為最大2040N(208kgf)的高強度。由此有助于滿足工作物的大型化、搭載機器人及傳送帶等需求。
搬送機器人負載性能受到容許徑向負載的影響。安裝法蘭輸出頭時為1500N(153kgf),中空軸扁平減速機為最大2040N(208kgf)的高強度。由此有助于滿足工作物的大型化、搭載機器人及傳送帶等需求。
容許徑向負載[N]
※1:電動機軸轉速為~300r/min的值 |
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
希望從指定位置設定剩余移動距離:位置控制
可像步進電動機及伺服電動機一樣設定移動量。可實現預先在導軌上設定的距離的搬送。在自行行駛中,
也可設定從傳感器位置移動到目標位置的距離,完成區間內的定位運行。
希望微調停止位置:速度控制
電動機軸的轉速可自1r/min進行設定。換算成搬送速度,車輪直徑為100mm時,約為0.3m/min。因為速度非常低,過沖少,可以進行停止位置的微調整。
并且,最高轉速為4000r/min,有助于提升搬送速度搬送速度從而減少所需時間。

固定車輛確保移載作業穩定進行
因搭載機械制動(電磁制動)及電氣制動,停止時可固定車倆。
即便是移載時或傾斜時也能抑制車輛偏移,有助于確保穩定作業。

因搭載機械制動(電磁制動)及電氣制動,停止時可固定車倆。
即便是移載時或傾斜時也能抑制車輛偏移,有助于確保穩定作業。
搬送機器人需要具備能應對路況變化、避讓突發障礙的的行車性能。因為可接收電動機的反饋信號,并針對反饋信號順暢地向各軸發布相應指令,故可靈活進行筆直前進?避讓?停止的調整。
●搭載高分辨率傳感器
傳感器的控制分辨率為最大36,000P/R。可詳細掌握行駛狀態及當前位置。
●直接數據運行
運行中的急剎車、速度恢復等可根據傳感器的信息進行靈活運行。
●ID共享模式?集中發送數據功能
可向多個車軸同時發送指令,因此能夠避免蛇行或進行急轉彎等動作。
対応製品
●搭載高分辨率傳感器
傳感器的控制分辨率為最大36,000P/R。可詳細掌握行駛狀態及當前位置。
●直接數據運行
運行中的急剎車、速度恢復等可根據傳感器的信息進行靈活運行。
●ID共享模式?集中發送數據功能
可向多個車軸同時發送指令,因此能夠避免蛇行或進行急轉彎等動作。
調整時的實用功能
●通過網絡進行各種設定
BLV系列 R型: 、
、
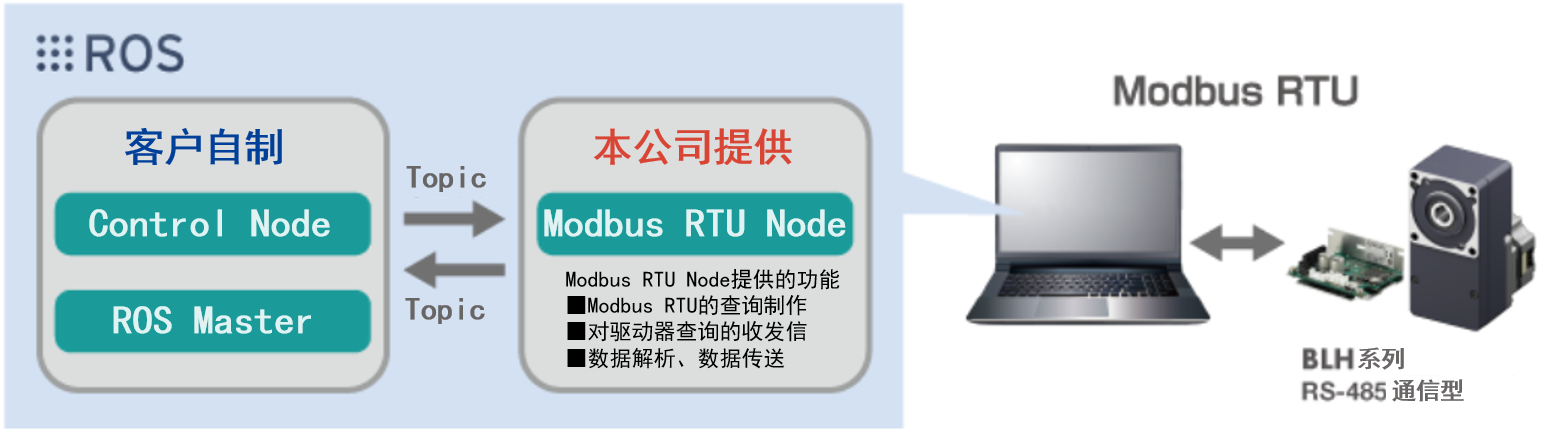
BLH系列:
BLH系列可由「ROS」制作的軟件進行控制。
●針對負載進行相應增益調整
可針對負載進行相應的增益(應答性)調整。有助于穩定行駛。
●狀態監控
可通過支援軟件的監控功能,對狀態進行把握。BLV系列R型搭載跟蹤監控,可連續進行最多1日的計測。
因此出現問題時有助于判明原因。
●通過網絡進行各種設定
BLV系列 R型:
、BLH系列:
BLH系列可由「ROS」制作的軟件進行控制。
●針對負載進行相應增益調整
可針對負載進行相應的增益(應答性)調整。有助于穩定行駛。
●狀態監控
可通過支援軟件的監控功能,對狀態進行把握。BLV系列R型搭載跟蹤監控,可連續進行最多1日的計測。
因此出現問題時有助于判明原因。
対応製品
●BLV系列 R型(?點此查看詳細介紹) |
●BLH系列 模擬信號設定型 ●BLH系列 數字設定型/RS-485通信型  |
| 特征 | 輸出功率 | ||||||
| 15W | 30W | 50W | 100W | 200W | |||
| 矮型?細長設計 高承重性能 |
輸出軸 | 中空軸扁平減速機 | ●● | ●● | ●● | ● | |
| 法蘭輸出頭 | ●● | ||||||
| 小型?薄型驅動器 | ●● | ●● | ●● | ●● | ● | ||
| 電磁制動 | ●● | ●● | ●● | ● | |||
| 電氣制動 | 負載保持 | ● | ● | ● | |||
| S-ON | ● | ● | |||||
| 停止位置的 設定·微調 |
位置控制 | ● | ● | ||||
| 速度控制 | 1~4000r/min | ● | ● | ||||
| 80~3000 r/min |
● | ● | ● | ||||
| 100~3000 r/min |
● | ● | ● | ● | |||
| 直行 回避 停止 |
高分辨率傳感器 | ● | ● | ||||
| 直接數據運行 | ● | ● | |||||
| 數據發送 | ID共享模式 | ● | ● | ||||
| 統一發信 | ●※ | ●※ | ●※ | ||||
| 對應網絡 | Modbus (RTU) |
●※ | ●※ | ●※ | ● | ● | |
| CANopen | ● | ● | |||||
| 增益調整 | ● | ● | |||||
| 支援軟件 | ● | ● | ● | ● | ● | ||
※:僅RS-485通信型
注意:本資料僅供參考。選購前請仔細確認設備需求和產品規格。如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
