
會員登錄/注冊



擺臂機構

|
如何提高半導體設備中擺臂機構性能, 實現準確滴膠? |
設備
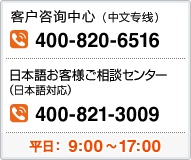
擺臂機構存在的問題
在使用擺臂機構對半導體零部件如硅晶片等昂貴制品進行滴膠作業時,常會遇到定位不準,導致涂膠、化學液刻蝕不均勻,造成制品廢品率較高的情況。| 1、精度不足 機構精度不足時,無法準確定位,偏離原定位置, 無法將化學試劑滴在指定位置。 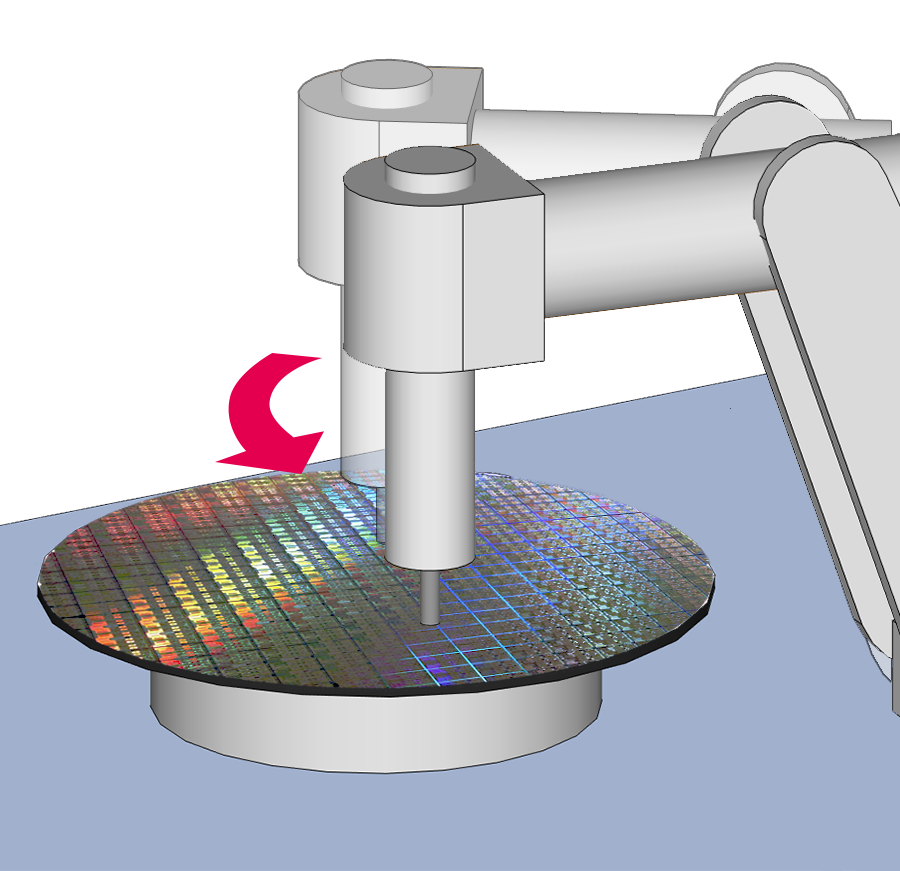
|
2.運行時振動影響 機構在運行時振動較大,導致膠液誤滴, 影響均勻涂布/刻蝕。  |

|
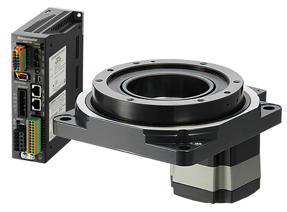
中空旋轉式傳動裝置 DGⅡ系列 | 
|
通過改善機構以及電動機精度,提高整體精度,減少定位不準帶來的影響。
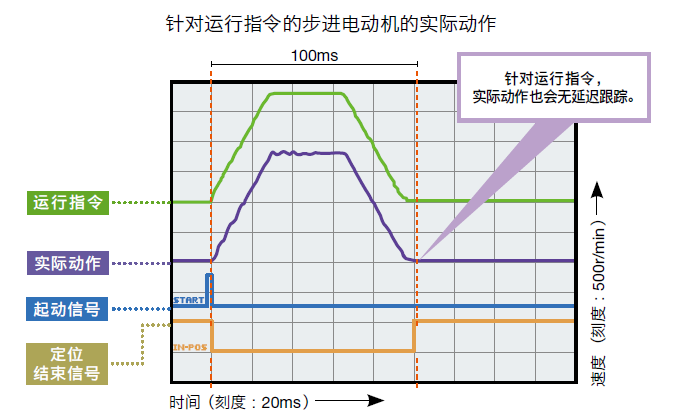
減少運行、停止時的微振
| DGII系列搭載了混合控制系統αstep AZ系列定位電動機。 AZ系列采取的獨特控制方式兼具了開環控制和閉環控制的優點, 定位時無微振,通過電動機自身保持力停止。 且配備了微步驅動、平滑驅動功能, 能夠抑制低速狀態下的振動,實現平滑動作。 
|
精度更高
DGII系列實現了機構與步進電動機一體化,可將滴膠的擺臂機構直接安裝在旋轉平臺上。相較于使用皮帶輪等機構而言,可大幅提高精度。且DGⅡ系列無齒隙,反復定位精度可達±0.004°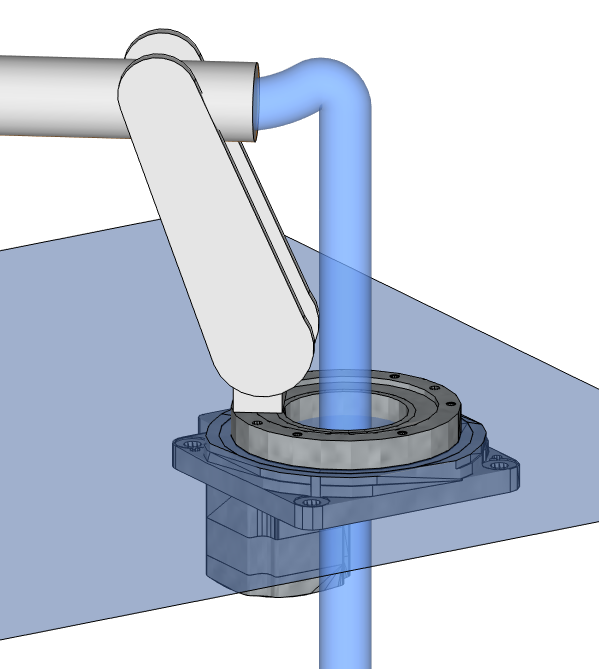
且AZ系列采用無需電池的絕對式系統,不需要原點傳感器、限位傳感器等外部傳感器。能有效避免受外界影響導致的傳感器誤動作。
DGII系列用于此類擺臂機構還有什么優勢?
除了能滿足精度和振動需求之外,DGII系列還具有以下優勢。
構造設計和配線更簡潔
DGII系列的大口徑中空孔構造,能夠使膠管等貫穿,構造設計和配線都更加簡潔。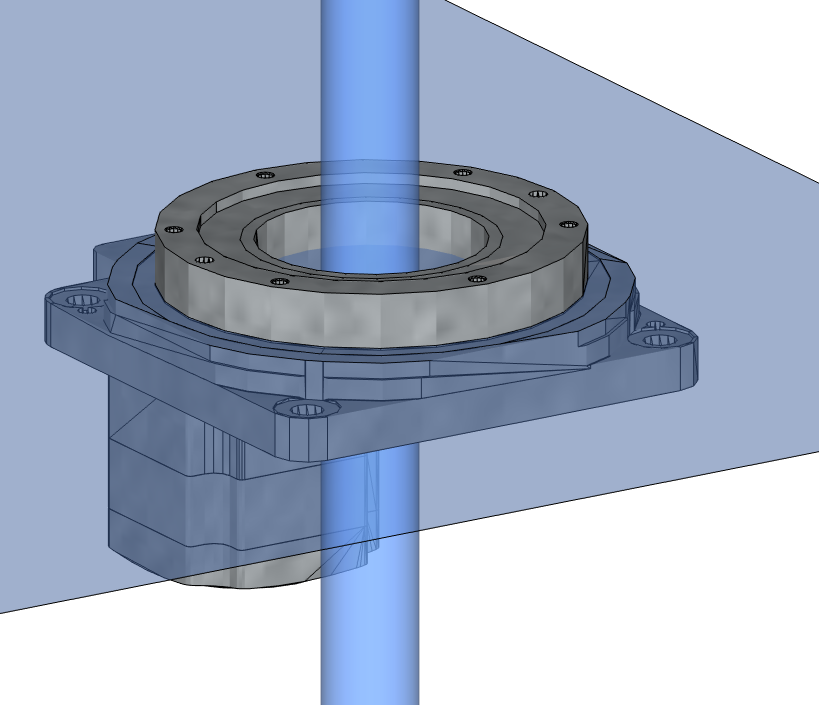
搭載的AZ系列電動機無需外部傳感器和電池,且電動機機構一體化產品,可有效減少機構設計、零件調配、皮帶狀態調節等所需的時間及費用。
大慣量高負載,以小型機身輸出高轉矩,具備優越的加速性和響應性,加快工作節拍,提升加工效率。
相關產品
 |
|