
會員登錄/注冊



真機實例集----SCARA機器人(水平多關節機器人)
裝置概要
使工作物的取放及工程間搬送自動化的自制SCARA機器人。運用于將以往需要人手工進行的連結、計測、組裝自動化的產線中。
在有限的空間中實現取放及工程間搬送。
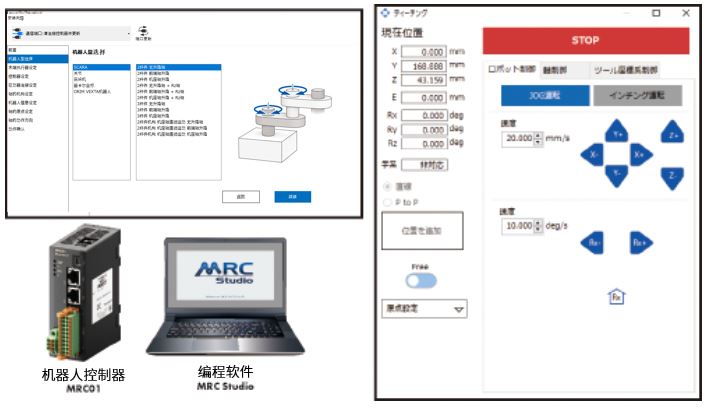
機器人控制器 MRC01
在現有系統中輕松導入自制機器人
通過EtherNet/IP™直接控制MRC01與上一級系統的協作。無需對現有設備的控制系統進行較大更改,即可輕松追加導入自制機器人。
 ? 1 MRC01也可通過I/O連接(無上一級設備)運行。
? 1 MRC01也可通過I/O連接(無上一級設備)運行。? 2 MRC01和AZ系列的驅動器之間通過RS-485通信進行控制。
即使是第一次使用也能簡單設置
MRC01即使沒有編程語言等專業知識,從初始設定到運行編程也可簡單設定。以向導形式輕松進行機器人類型的選擇和機構信息的輸入等一系列初始設定。也可邊通過示教操作運行自制機器人,邊在運行程序中追加目標指令。由于可通過1個指令完成復雜的設定所以即使新手設備設計者初次使用也能在較短的時間完成編程。
●編程軟件 MRC Studio、EDS文件可從官方網站下載。
|
|
●視頻介紹
|
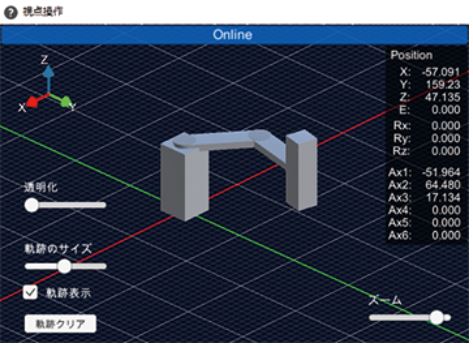
在線3D模擬中確認動作
|
可在3D模擬器上確認機器人的工作程序。 |
 |
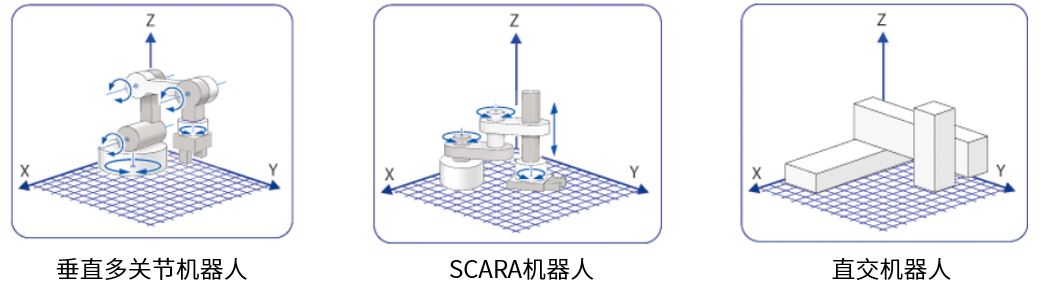
可控制末端執行器軸
可對應工業用機器人中具有代表性的:垂直多關節機器人、SCARA機器人、直交機器人。
末端執行器軸也可通過MRC01控制,有助于系統整體的省空間、省配線及省成本。
可對應豐富的產品
 |
|
|
|
AZ系列內藏定位型驅動器
AZ系列mini驅動器RS-485通信型
|
