
會員登錄/注冊



機械手設備

|
步進電動機的同步性和高響應性的應用 |
同步性、高響應性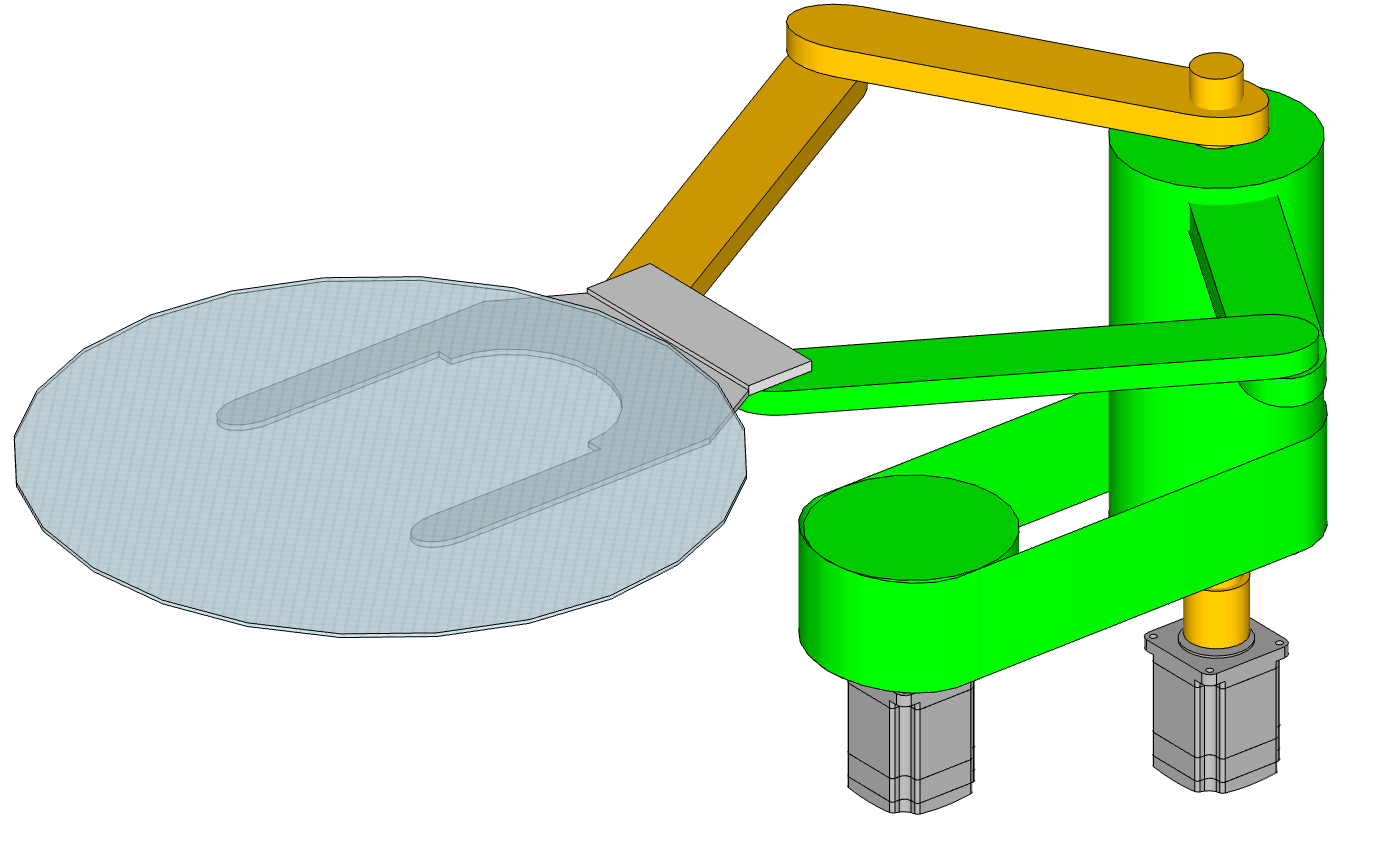 |
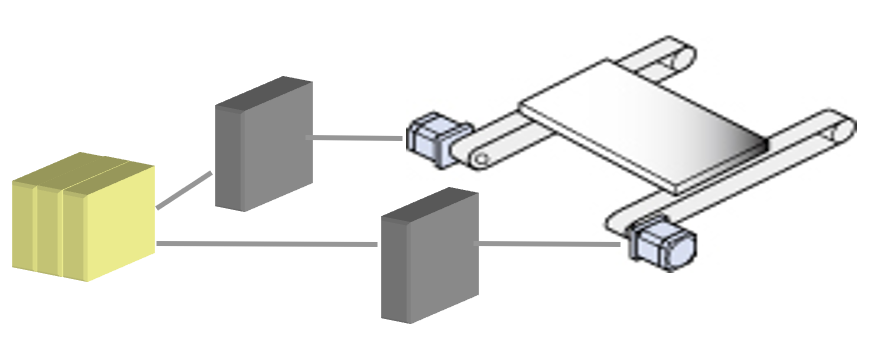
機械手設備:穩定地對物料進行取、放
設備:機械手機構:電動機直連/皮帶機構 動作概況:通過兩臺電動機同時相反方向轉動,分別帶動機械手的兩個手臂伸縮進行晶圓、玻璃的取、放料。 痛點:使用伺服電動機進行驅動機械手取、放料,停止過程會出現不同程度的晃動,導致物料的磨損。 |

|
步進電動機 |

|
步進電動機免增益調整的開環控制
痛點分析:①由于存在低剛性(皮帶)傳動機構的設計,伺服電動機在停止時的增益調整易使得機構晃動,且整定不好調節。

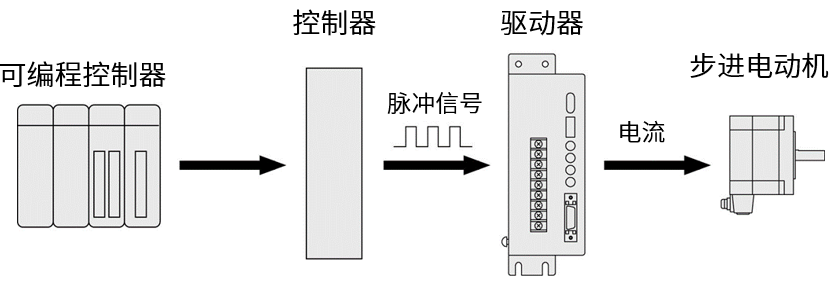
開環控制的步進電動機無需進行增益調整
電動機本體是被設計僅用控制器、驅動器、電動機構成開環控制方式就可以簡單地進行“高精度定位運行”的同步電動機。
 |
|
?點此查看步進電動機與伺服電動機的區別
步進電動機更易實現多軸同步運行
痛點分析:②要求同步性高,因兩手臂各軸的機構設計不同,動作響應會因機構增益調整不同而存有差異,同步性的實現更困難。
同步運行多臺電動機
想要同步運行多臺的電動機時,以開環控制系統驅動的步進電動機更容易使用。
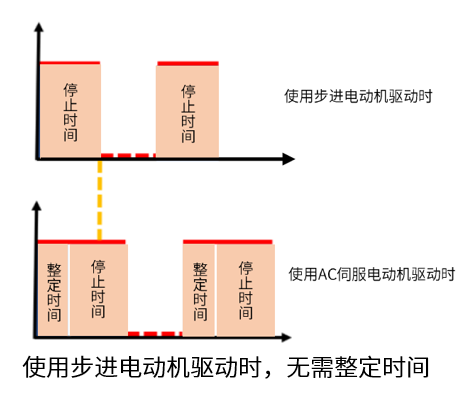
●步進電動機的同步運行
因為是開環控制,無需針對機構進行增益調整,可實現與輸入的脈沖進行同步運行。只要脈沖指令同步輸入,多臺電動機可進行幾乎相同的運行。
●AC伺服電動機時的同步運行
因為是閉環控制,必須對應負載的狀態做增益調整*,相對脈沖指令發生遲延。控制多臺電動機時,因遲延時間各不相同,有互相干擾運行不穩定情況的發生。
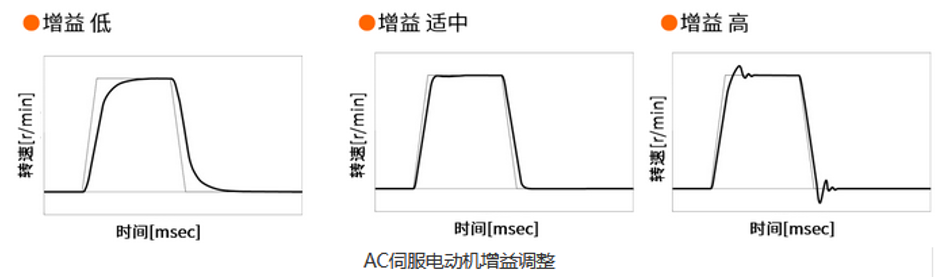
*部分伺服電動機支持的自動增益功能,可有助于改善增益調整的效果,提高調試效率。
AZ系列步進電動機創造更多的高附加值
搭載免電池機械式絕對式編碼器
無需外部傳感器的應用,在狹窄空間中也無需考慮空間的設計布局,自由度更高。
無需外部傳感器的應用,在狹窄空間中也無需考慮空間的設計布局,自由度更高。
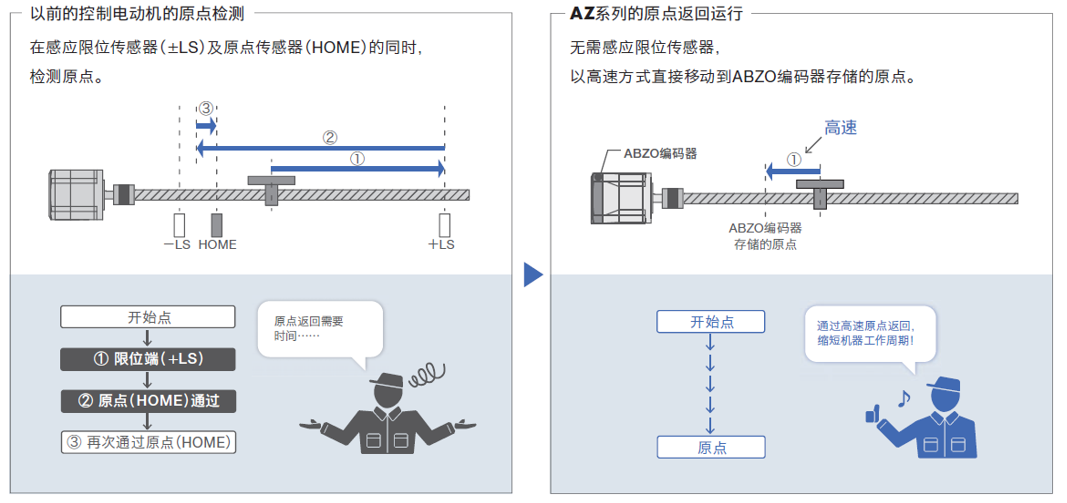
高速原點返回
不使用原點傳感器就能執行高速原點返回,提高原點返回的效率,有效縮短機器工作周期,控制更高效。 相關產品
| |
注意:
本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
