
會員登錄/注冊



晶圓Pin針頂升機構的設計提案
裝置概要
隨著半導體工藝發展,對設備的要求也越來越高,對每個軸的動作也愈發嚴格。小型化、高效率、高精度、低振動……眾多需求在機構上的設計應用,以下將為您介紹各類提案:
 *圖示僅供參考,需外置導軌設計
|
|
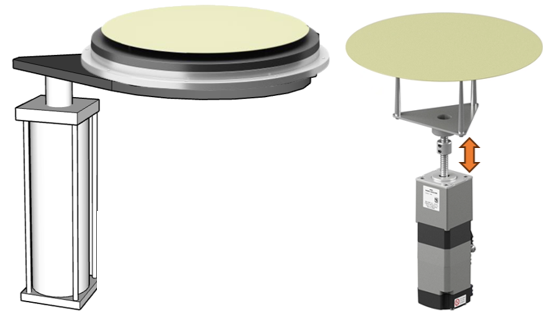
實現的動作: 將吸附于平臺上的晶圓片通過Pin針頂起,以便于利用搬運機械手進行取、送晶圓片。
※頂起前,晶圓通過“靜電吸附”、“真空吸附”等方式,附著在平臺上。
• 需要頂起多片晶圓,實現大負載。
• 頂升機構希望實現小型化。
• 提升效率,提高產能。
機構痛點·難題
• 靜電吸附型平臺,用氣缸頂升PIN針,可能出現“裂片”。• 需要頂起多片晶圓,實現大負載。
• 頂升機構希望實現小型化。
• 提升效率,提高產能。
課題:提升設備效率,提高產能
為提升生產效率,部分設備需要Pin針頂升、晶圓輸送等多機構同步動作:
場景①:兩軸無法很好配合動作,存在機械干涉、碰撞等問題;
場景②:一軸完成動作后,再執行第二軸動作,則效率較差。
因此,支持運動網絡控制型的驅動控制尤為重要,可支持實現多軸同步聯動運行,輕松提高動作效率。
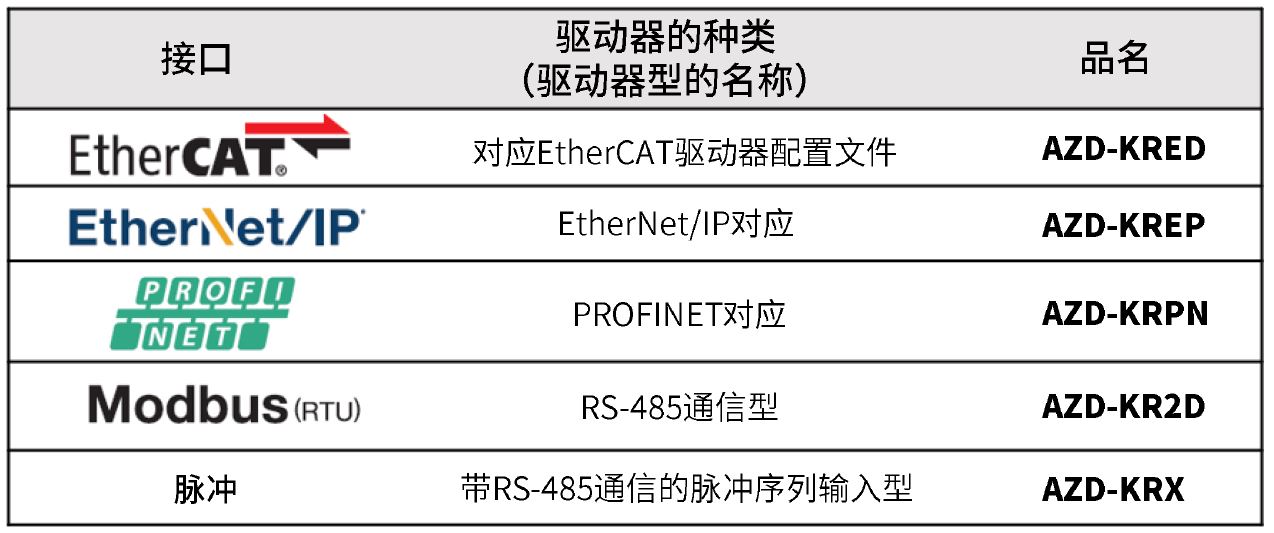
解決方案: AZ系列對應各種FA網絡的驅動器

●六軸機械臂樣機視頻
為提升生產效率,部分設備需要Pin針頂升、晶圓輸送等多機構同步動作:
場景①:兩軸無法很好配合動作,存在機械干涉、碰撞等問題;
場景②:一軸完成動作后,再執行第二軸動作,則效率較差。
因此,支持運動網絡控制型的驅動控制尤為重要,可支持實現多軸同步聯動運行,輕松提高動作效率。
解決方案: AZ系列對應各種FA網絡的驅動器
最多可同時控制4軸的多軸驅動器
|
●直接耦合上一級網絡 可使用1臺驅動器控制多軸。上一級網絡及電源的連接集中在1臺驅動器中,有助于節省配線和降低成本。 ●以統一的控制完成各種運動 步進伺服混合控制系統αSTEP AZ系列、除各種型號齊全的標準型外,備有帶電磁制動、減速機型等產品,同時還備有電動機與電動傳動裝置組合的機構產品。
|
 |
●六軸機械臂樣機視頻
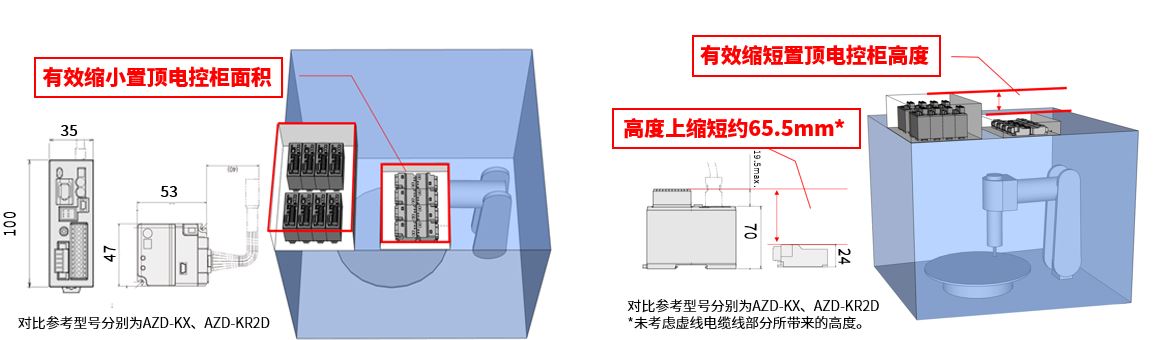
小型·薄型的mini驅動器,讓設計自由度更高
●支持全球主要工業用網絡,選擇更多樣
●可收納到狹窄空間的小型化設計
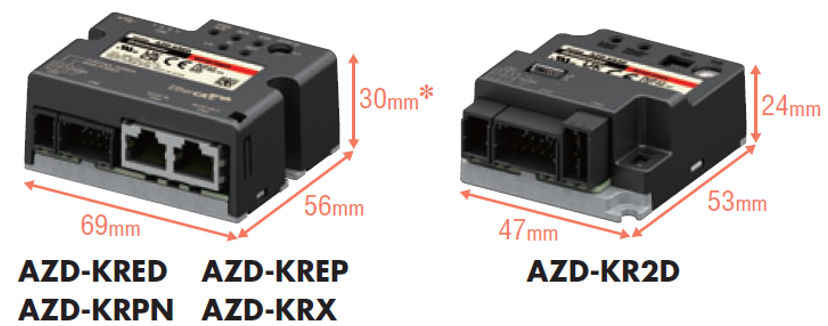
?AZD-KRX為25mm
?AZD-KRX為25mm
●應用:半導體制程設備(例:多腔體結構)
①電控柜布局更緊湊*、實現小型化;
(如增加單元腔腔體數量,但電氣柜不會按腔體數量配套增加時,Mini驅動器更節省空間。)
②有效提升設備空間利用率。
①電控柜布局更緊湊*、實現小型化;
(如增加單元腔腔體數量,但電氣柜不會按腔體數量配套增加時,Mini驅動器更節省空間。)
②有效提升設備空間利用率。
搭載產品


注意:
本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。