
會員登錄/注冊



步進電動機振動剖析&解決方案
1步距響應
|
指步進電動機動作1個步距時,轉子發生的角度變位。
步進電動機在轉動1個步距角,轉子到達目標位置后,因轉動慣量和角度-轉矩特性的恢復力而反復進行衰減振動(過沖·回沖),最終在指定位置停止。 脈沖信號連續輸入時,步進電動機的動作由1步距響應的重復疊加形成。因此,隨著脈沖信號輸入,步進電動機有可能會產生振動的現象。 |
 |
連續步距響應
|
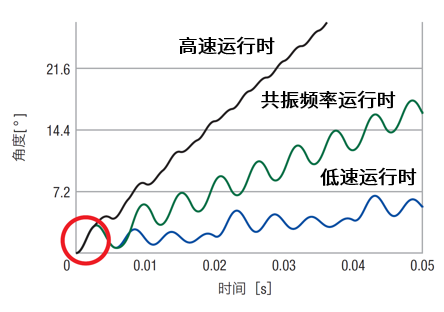
電動機的振動大小受轉速影響發生變化。
低速運轉:連續產生1步距響應特性。
共振頻率:由于持續大幅度過沖?回沖現象重疊,振動較大。 高速運轉: 在產生過沖?回沖之前切換到下一個步距,振動不明顯。 |
 |
振動特性的測定
|
◇ 測定工具與方法
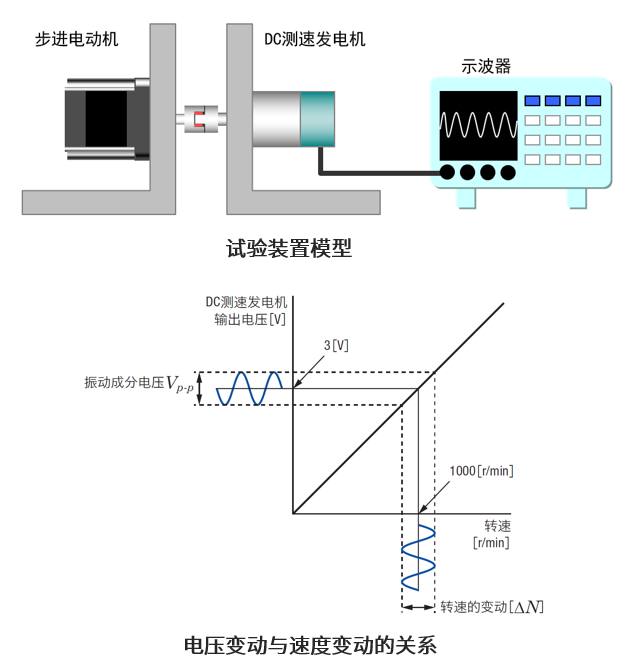
旋轉中的電動機動作,通常以速度進行觀測。東方馬達在觀測步進電動機速度時,以DC測速發電機(1000 r/min 下3 V 輸出)為手段。
DC測速發電機將檢測到的轉速變換成直流電壓輸出,
通過測定電壓變動進行測定步進電動機的振動的大小。 如圖所示,電壓變動與速度變動的關系呈比例關系。 |
 |
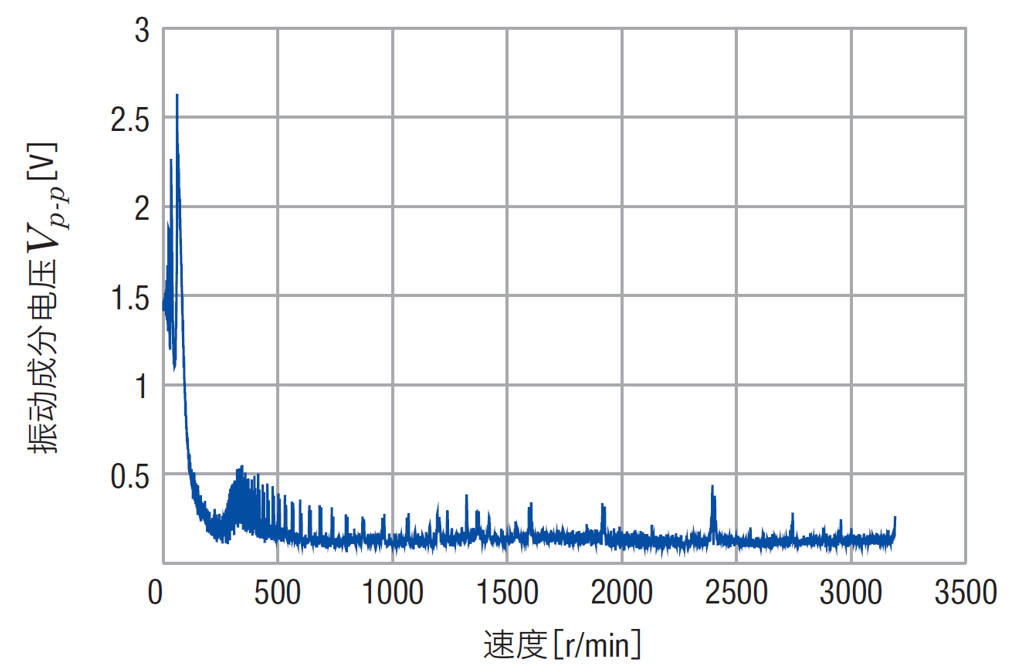
◇2相步進電動機整步驅動下的振動特性
其中,振動劇烈變大時的某一脈沖頻率(速度)領域稱為共振頻率。
其中,振動劇烈變大時的某一脈沖頻率(速度)領域稱為共振頻率。
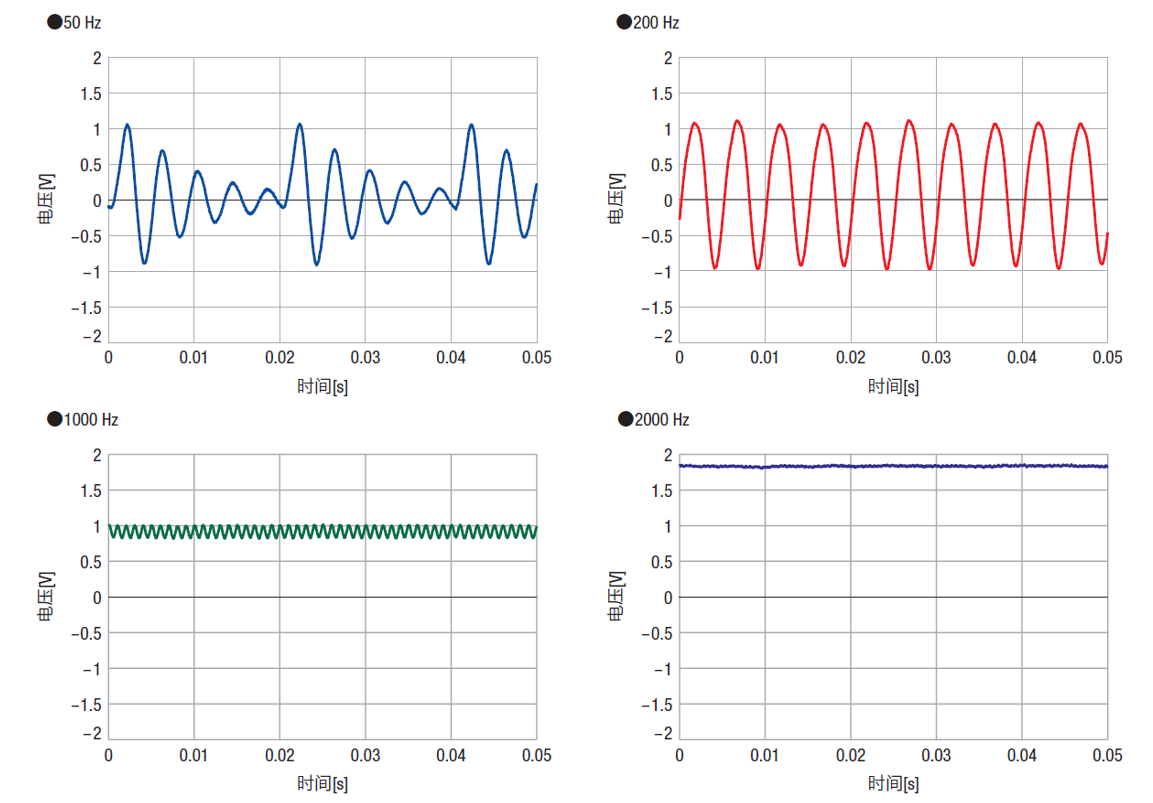
◇不同速度下DC測速發電機的輸出波形
隨著速度的提高,振動越小。
隨著速度的提高,振動越小。
▲回到頁首
--------振動產生的原因---------
▲回到頁首
轉矩的變動
低速下的大幅振動是步距動作時的轉矩變動引起的。勵磁切換意味著在極短時間內造成角度-轉矩特性的移動,
因此會發生轉矩跳躍,導致速度變動。
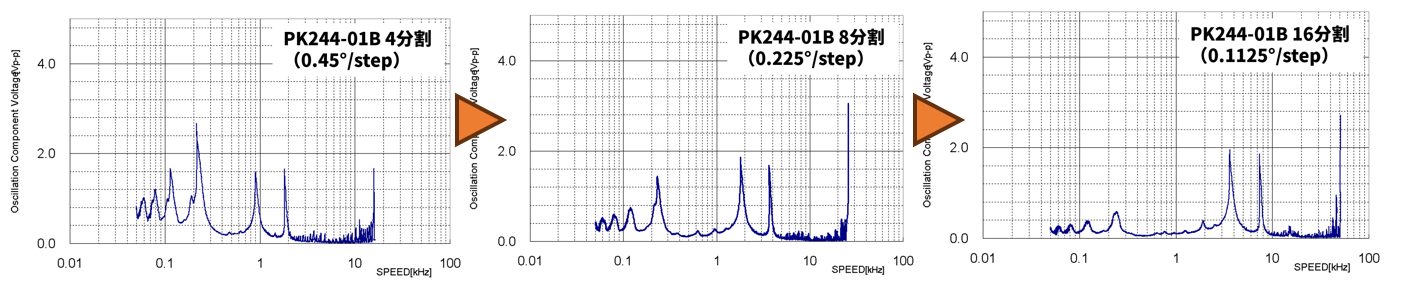
如果步距角度比例變小,則勵磁切換時的轉矩變動也小,振動隨之變小。

|
POINT
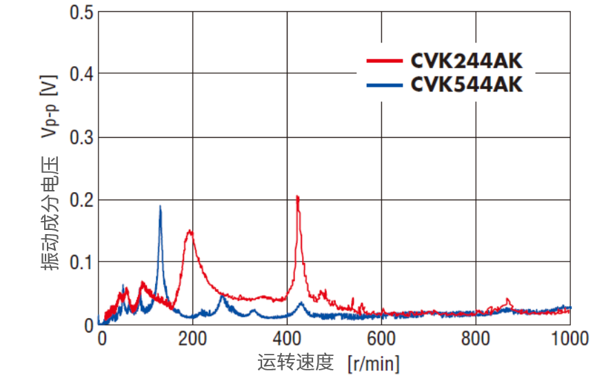
5相步進電動機從結構上擁有比2相更好的振動特性。 可有效降低振動。
|
 |
慣性負載的影響
|
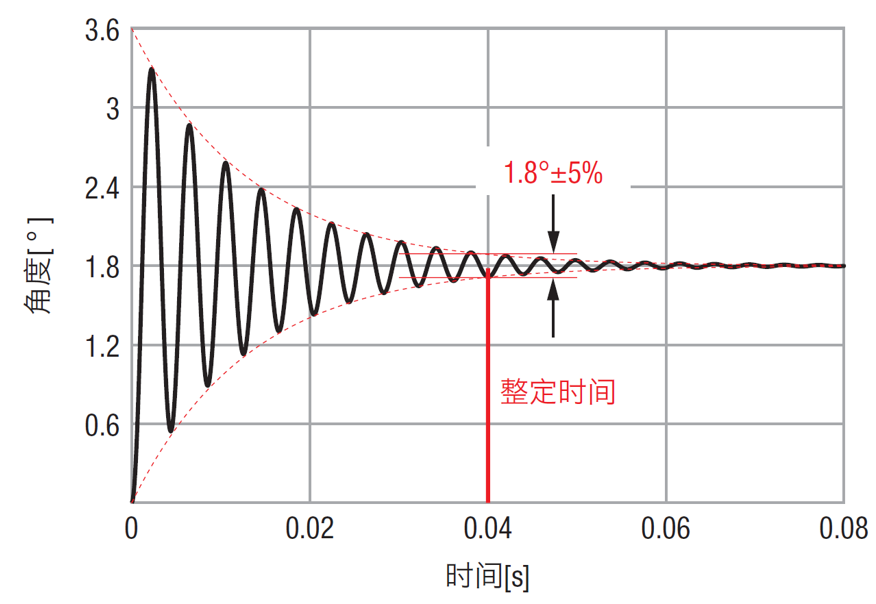
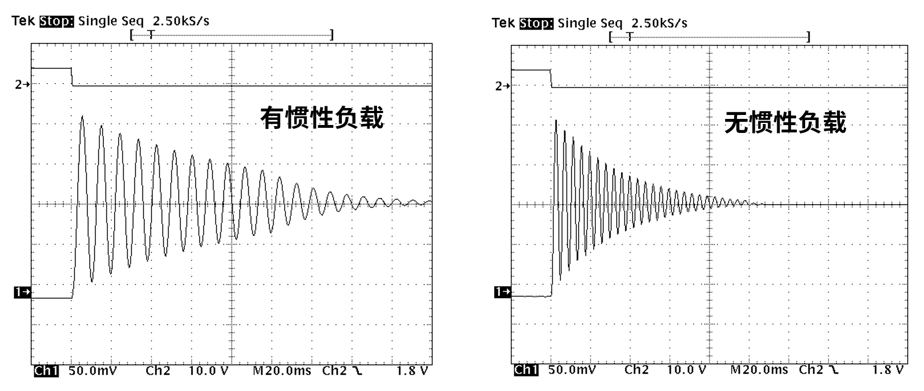
施加慣性負載時,振動周期會被放大。即使電動機轉矩相同,但如有慣性負載,則加速度會減小,動作會變得緩慢。
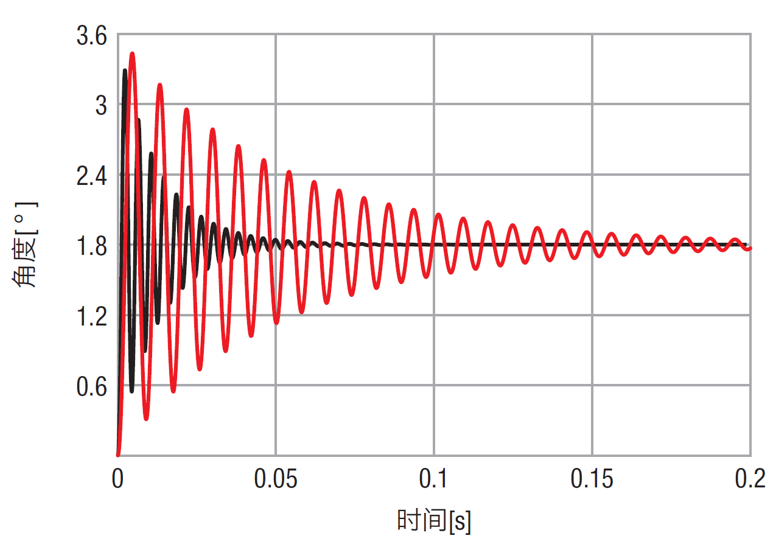
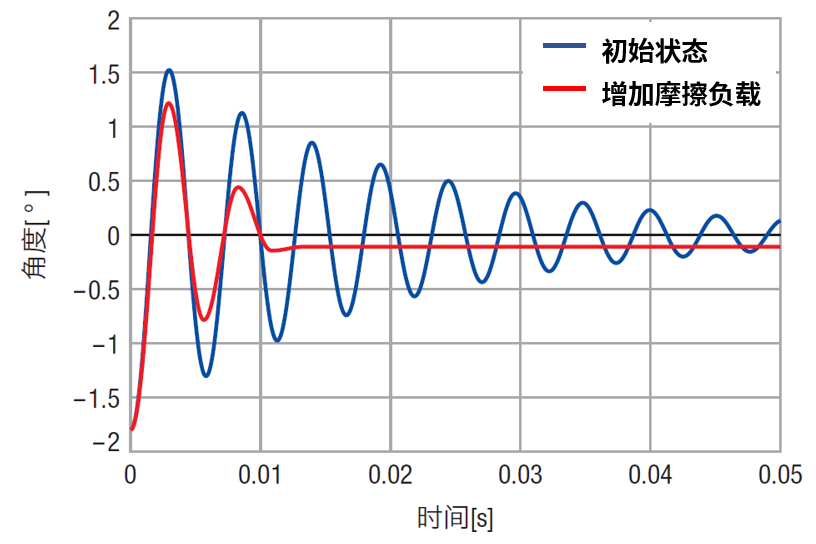
右圖是用1步距響應來表示慣性負載的影響。
●黑線為電動機單體狀態。紅線為轉子附加3倍轉動慣量的狀態。
●由于總慣性增加了4倍,因此振動周期為2倍,振動衰減時間約為4倍。
|
 |
--------振動特性的改善提案---------
▲回到頁首
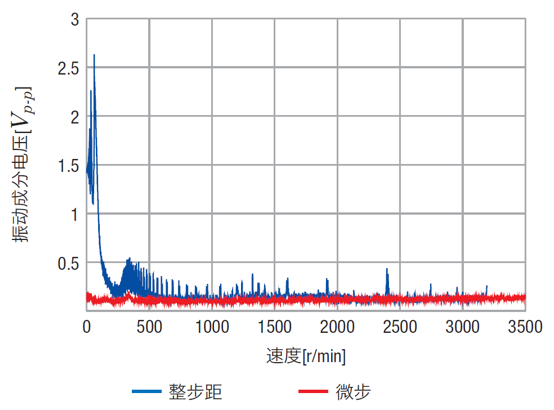
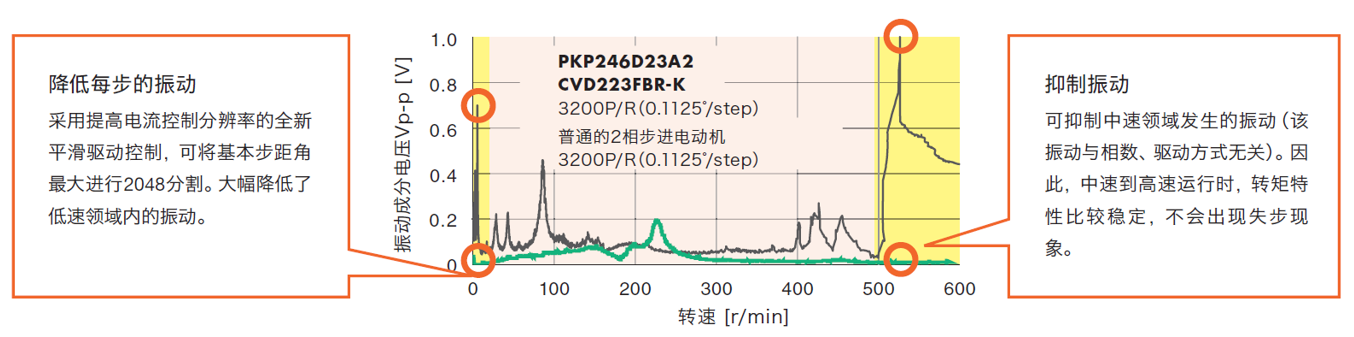
微步驅動
◇縮小步距角,降低過沖·回沖
微步驅動是將輸往步進電動機各線圈的電流作細分化分配,使定子的磁通量變化平順。步進電動機步距角變小,同時抑制轉矩余波。
通過驅動電路實現電流的微小變化,將步距角細分化的微步技術,有效降低振動與噪音。
微步驅動是將輸往步進電動機各線圈的電流作細分化分配,使定子的磁通量變化平順。步進電動機步距角變小,同時抑制轉矩余波。
通過驅動電路實現電流的微小變化,將步距角細分化的微步技術,有效降低振動與噪音。
|
POINT
2相CVD驅動器的電流控制分辨率(平滑驅動控制)最高可達2048*200=409600分割/轉。 |
 |
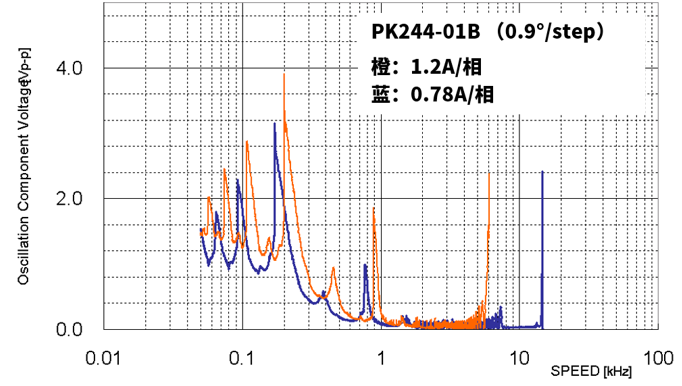
降低驅動電流
|
◇去除多余的轉矩
降低驅動電流*以消減多余的轉矩,減小轉矩跳躍產生的影響。
*注意確認滿足轉矩安全率 |
|
POINT 分辨率不高時, 如多余的轉矩過大, 轉矩跳躍的影響會變大, 從而產生振動, 嚴重時會造成電動機失步。 |
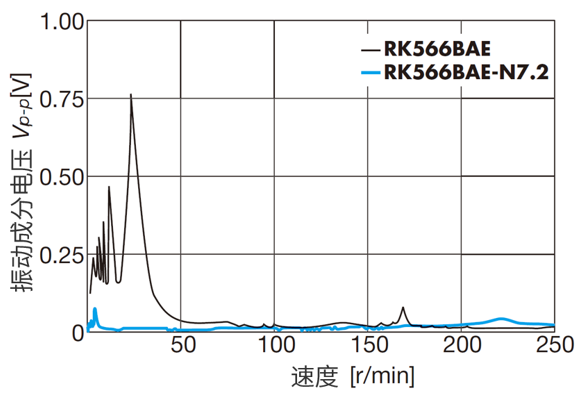
使用減速機型電動機
|
◇ 避開共振頻率
使用減速機時,電動機轉速提高,可避開振動較大的低速領域、共振頻率。
同時減小因慣性負載過大而產生的抖動,縮短定位時間,但最高速度會降低。
|
|
POINT 圓盤、擺臂等 大慣量機構, 慣性比過大會造成振動, 甚至失步。 |
增加慣性負載
|
◇ 改變共振頻率
適當的增加慣性負載*可改變共振頻率, 從而減小振動。
*注意確認滿足轉矩安全率 |
 |
增加摩擦負載
|
◇ 加快振動衰弱
增加摩擦負載*使得轉子的動作延遲。摩擦負載對振動頻率沒有影響,但由于摩擦負載會吸收振動能量,會加快振動衰減。 *注意確認滿足轉矩安全率 *注意停止精度可能會變差 |
 |
使用制振器
|
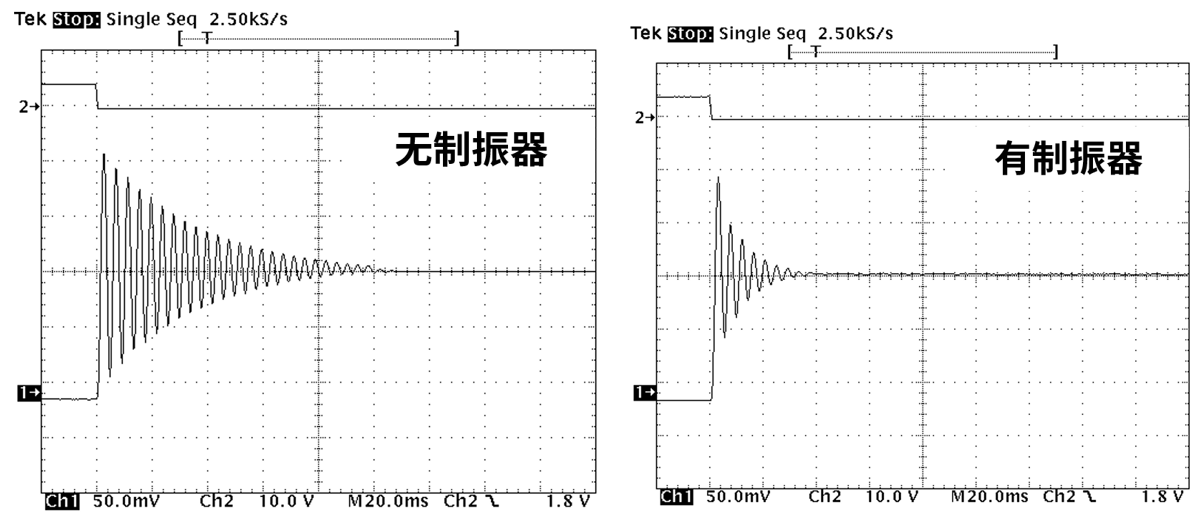
◇ 吸收振動能量
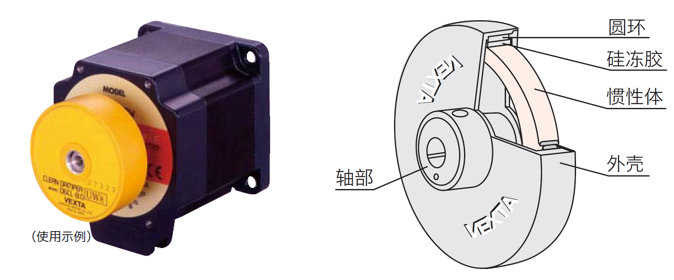 是一種可有效抑制步進電動機的振動及改善高速性能的機械式阻尼器。 慣性體與硅凍膠密封于塑料外殼內,由硅凍膠吸收振動能量,并轉化成熱能。 |
 |
使用高分辨率型電動機
|
◇ 縮小步距角·避開共振頻率領域
從電動機機械結構上改變共振頻率,以減小振動。 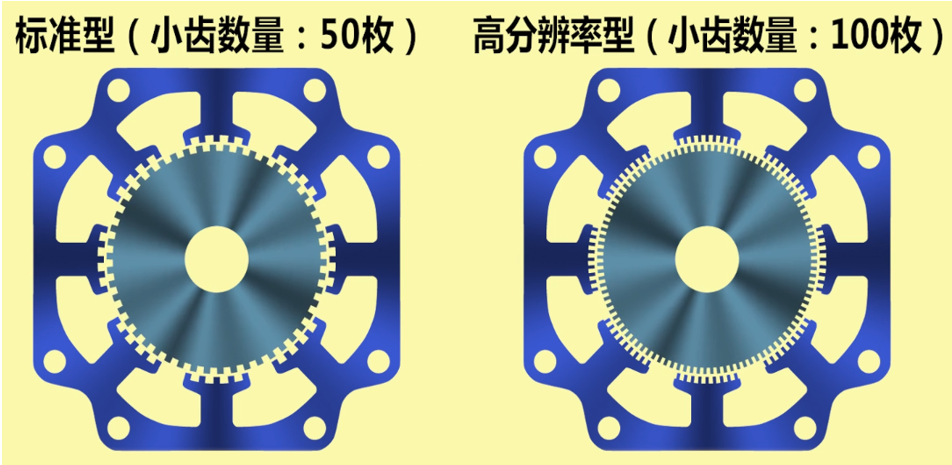 |
POINT 當微步驅動的分辨率設置最大時,高分辨率型比標準型的分辨率多出一倍,可進一步減少振動。 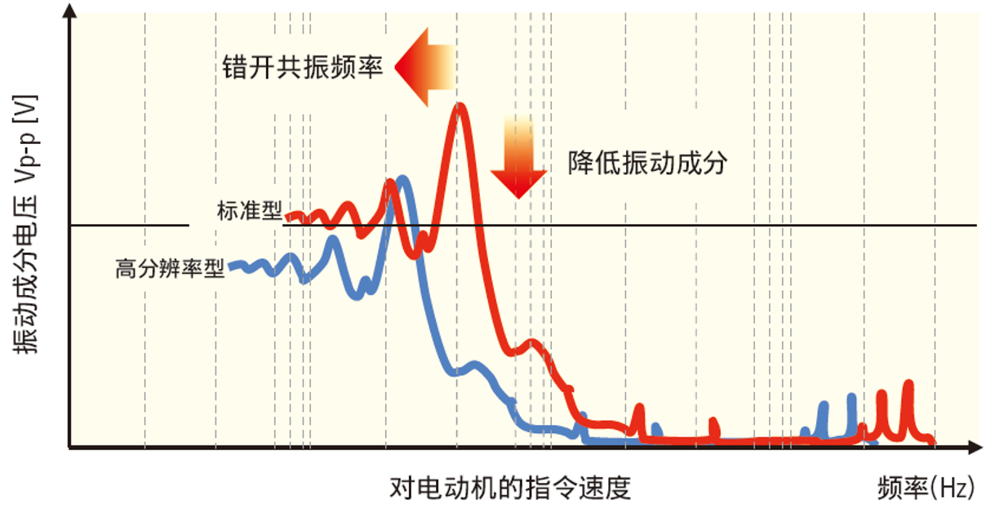 |
--------東方馬達技術設計·助力實現低振動性能---------

優異的電流控制
|
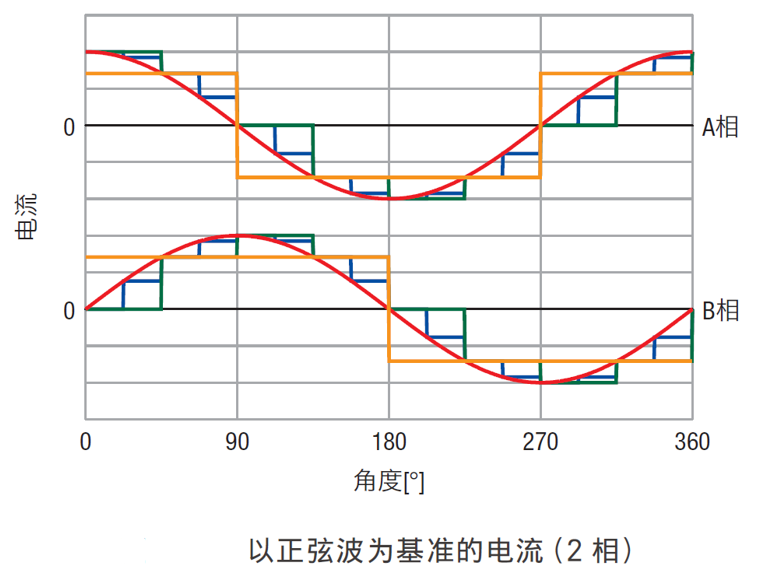
◇ 以正弦波為基本的驅動
為保證發生轉矩恒定,步進電動機實現的關鍵是“切換”線圈的電流,如電流波形按矩形波方式進行的運行。此時,無法保證發生轉矩保持恒定,存在轉矩變動導致振動變大的速度區間。 東方馬達驅動器對電流波形進一步細分分割后,電流波形逐漸接近正弦波的現象,故此能夠順暢的運轉。  |
 |
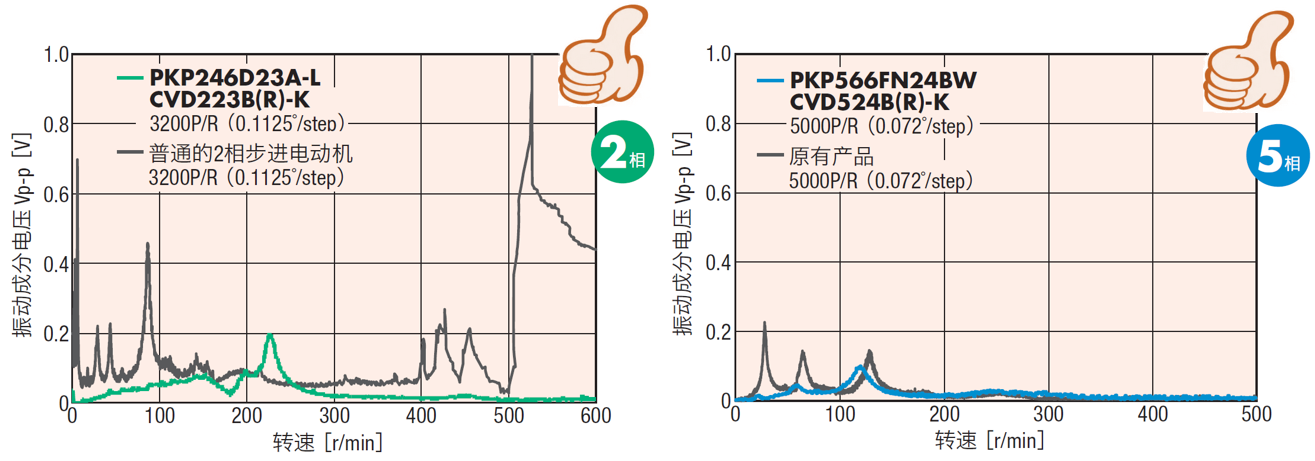
◇ CVD系列全速領域微步驅動
采用全數字控制的微步驅動器,電流控制實現數字化,大幅改善振動幅度,全速度領域實現更低振動和噪音。
采用全數字控制的微步驅動器,電流控制實現數字化,大幅改善振動幅度,全速度領域實現更低振動和噪音。
◇平滑驅動控制
減小步距角以降低過沖·回沖,實現正弦波電流驅動,使用整步也能平滑運行。
減小步距角以降低過沖·回沖,實現正弦波電流驅動,使用整步也能平滑運行。
實時獨立的電流檢測
|
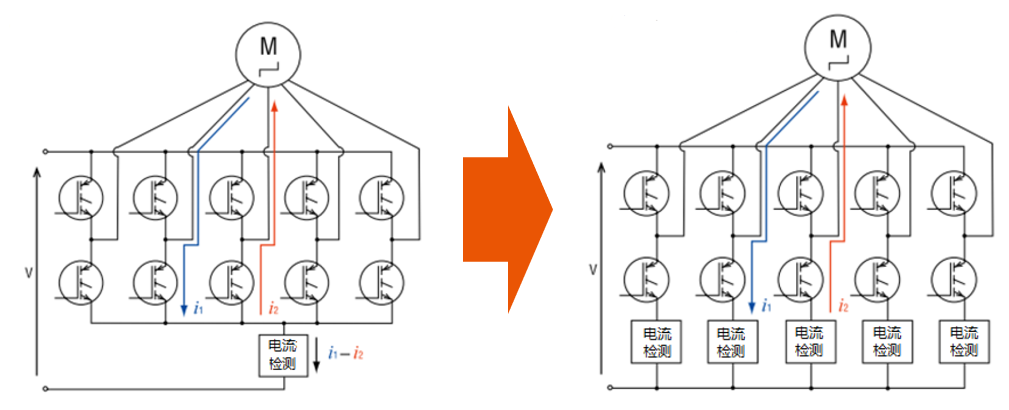
◇ 各相電流獨立檢測
該設計能正確檢測出電動機的輸入電流。但需使用較多的檢測電路和檢測信號,電路構成較為復雜。CVD驅動器通過數字化控制進行了彌補。 |
 |
高精密的電動機制造
|
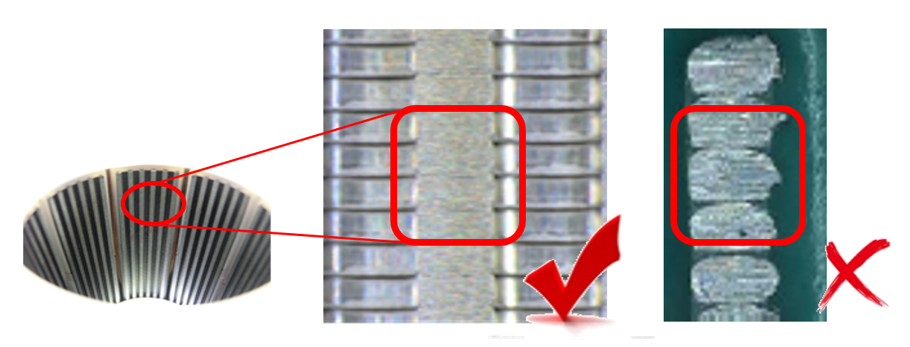
◇ 精加工的定子/轉子小齒
對轉子·定子上的小齒施行研磨精加工,內部加工精度的差距對于特性表現是相當明顯。 這是影響步進電動機停止精度的精準性、振動的重要因素之一! |
 |
全速度領域 低振動·低噪音
CVK系列5相具有更佳的振動特性。
相關產品

注意:本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。