
會員登錄/注冊



使用EH系列3爪型電動夾爪 夾取各種形狀和材質的工作物
| ~ 嘗試用EH系列3爪型夾取各種形狀、材質的工作物的實驗~ 實現如同人指般的精細“抓取”,幫助實現自動化節省人力。 穩妥抓取易受損的玻璃、易變形的樹脂等。 |
|
|
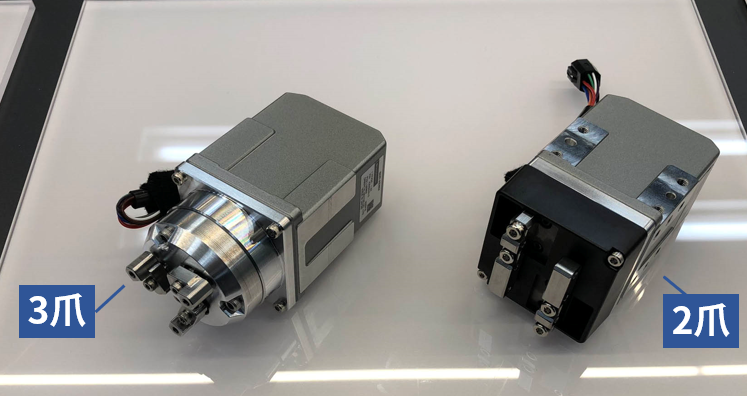
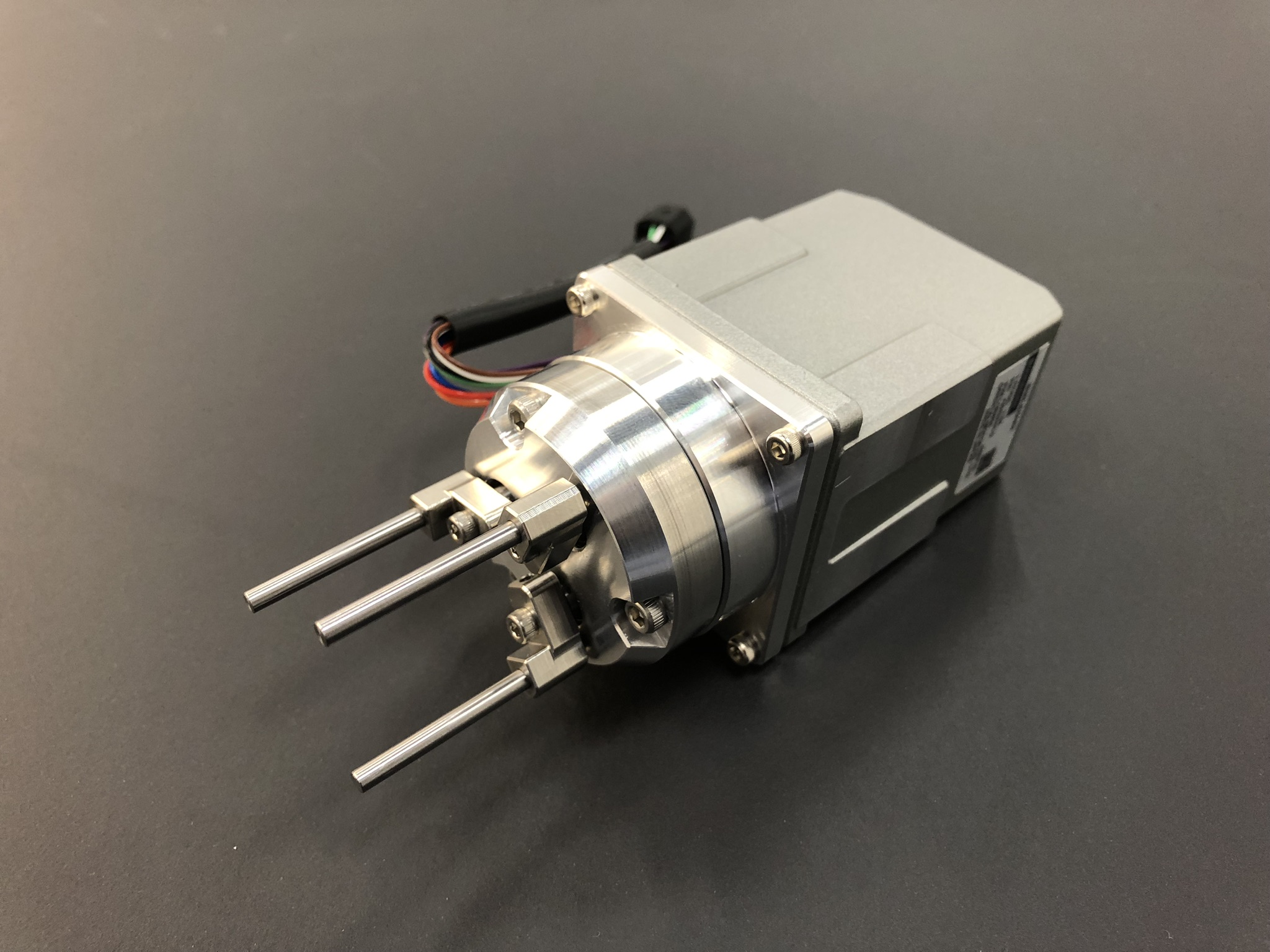
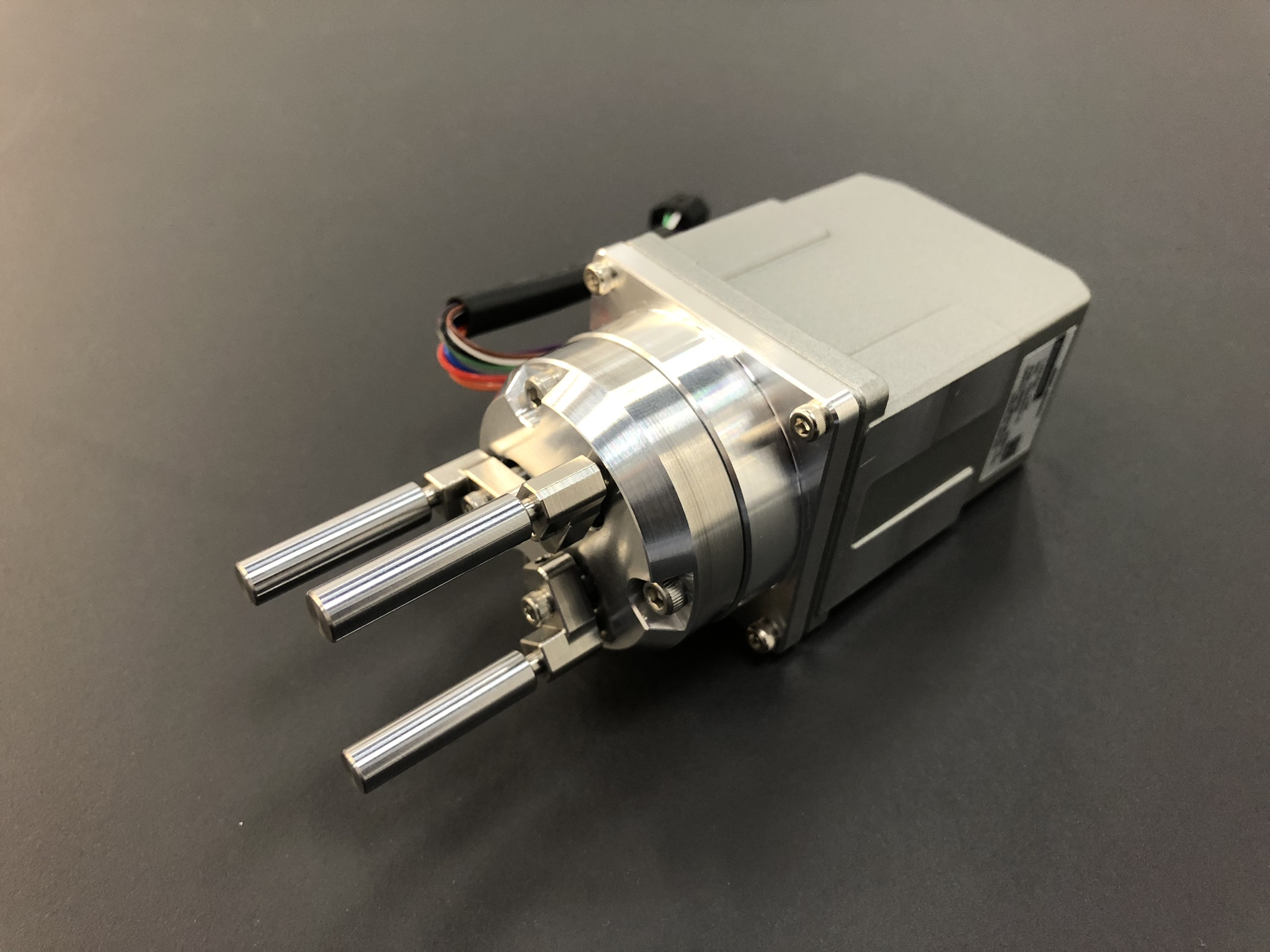
3爪型備有帶安裝護蓋/無安裝護蓋產品。 此次使用的是帶安裝護蓋的產品, 特性及性能不變。 用到的帶安裝護蓋的產品大小從夾爪側看, 縱橫46mm×48.5mm、深98mm。 產品重量380g。最大把抓力為27N。 手指的最高速度為1200r/min、 壓推運行的速度上限為12r/min。 右圖左側為此次實驗使用的3爪型。
|
系統構成

|
|
實驗使用以下內容 電動機(3爪電動夾爪)、驅動器(內藏定位型)、 樣機上使用的I/O box和DC24V電源(金屬盒內)。 使用產品 EH4T-AZAKH, AZD-KD
|
|
|
|
EH系列3爪型電動夾爪開閉動作
夾爪開閉的狀況請觀看以下視頻。在直徑3mm的夾具上套上了黑色膠套。
主要設定:分辨率為初始設定、運行速度為1kHz、往返的移動量為0~2200[step]
進行絕對定位壓推運行。
出于實驗目的,將運行電流下降到10%左右。(一般最多可下降到20%左右)
不易損傷工作物的抓持實驗
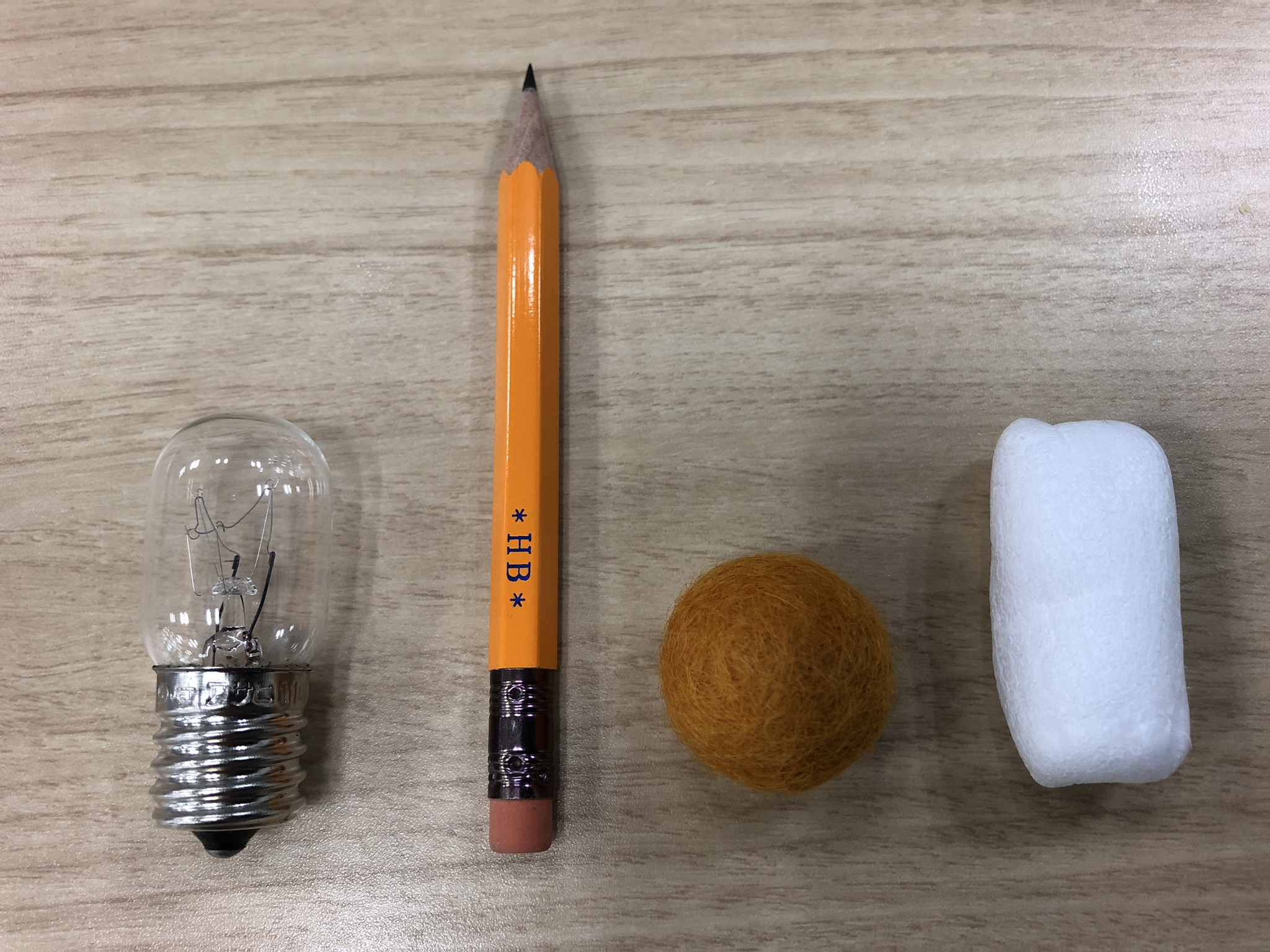
| 嘗試抓取了容易聯想到把持力大小的燈泡、鉛筆、毛線球、彈性材料。 從外側抓持這些工作物。 根據規格來講,夾具的直徑為6mm時,張開幅度為Φ24、 因此可抓持大約在Φ20以下的工作物。
|
|
|
實驗結果:
準備了各種類型的工作物:玻璃材料、六角形、2種較硬的與柔軟的易變形物。
均可以完成抓持。
但彈性材料可能因設定的運行電流大小,產生些許形變。實際運行前請充分確認。
準備了各種類型的工作物:玻璃材料、六角形、2種較硬的與柔軟的易變形物。
均可以完成抓持。
但彈性材料可能因設定的運行電流大小,產生些許形變。實際運行前請充分確認。
利用工作物內徑的抓持實驗
| 其次嘗試抓持工作物的內徑。工作物選擇了, 黑色橡膠材質的環形(Φ20)和三角燒杯(內徑17mm、重量42g)。
|
|

|
實驗結果:
均可以完成抓持。
均可以完成抓持。
| 實驗結論: 就像上述這樣,3爪型有著可以將球體、圓柱、圓筒、六角形等工作物以3點支撐穩妥進行抓取的優勢。 可作為機器人末端執行器的備選項。 ※本實驗涉及的數據及結果僅為樣機測試值,并非產品規格值。 |
