
會員登錄/注冊



步進(jìn)電動機(jī)和伺服電動機(jī)關(guān)于停止精度的區(qū)別
| 通過以下靜止角度誤差實(shí)測值, 可知步進(jìn)電動機(jī)和伺服電動機(jī)均可用于高精度定位。 |
步進(jìn)電動機(jī)的停止精度
步進(jìn)電動機(jī)(含αSTEP)借助電動機(jī)內(nèi)部定子和轉(zhuǎn)子的機(jī)械構(gòu)造,無需編碼等傳感器即可實(shí)現(xiàn)正確的定位。步進(jìn)電動機(jī)僅受加工精度、組裝精度、線圈的直流電阻這些因素的輕微影響,因此可實(shí)現(xiàn)±3分(無負(fù)載時)的高精度定位。下面是αSTEP AZ系列整步運(yùn)行是的靜止角度誤差實(shí)測值。可見停止精度為±0.02°的高精度定位。
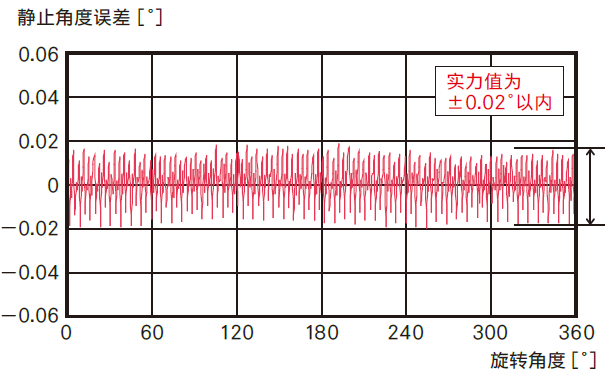
使用開環(huán)步進(jìn)電動機(jī)時,如果希望提升電動機(jī)的停止精度,也可以使用高分辨率型產(chǎn)品。
伺服電動機(jī)的停止精度
伺服電動機(jī)的停止精度因編碼器解析度而不同。
可按解析度如下計(jì)算。
伺服電動機(jī)停止精度 = 編碼器解析度 ±1脈沖以內(nèi)
以解析度為1000的編碼器為例,停止精度為0.36±1脈沖。
編碼器解釋度越高停止精度越高。但是,因編碼器和電動機(jī)的組裝誤差,可實(shí)現(xiàn)的停止精度存在極限。
以下是東方馬達(dá)搭載20bit編碼器的伺服電動機(jī)的實(shí)測值,可看出能實(shí)現(xiàn)高精度的定位。
可按解析度如下計(jì)算。
伺服電動機(jī)停止精度 = 編碼器解析度 ±1脈沖以內(nèi)
以解析度為1000的編碼器為例,停止精度為0.36±1脈沖。
編碼器解釋度越高停止精度越高。但是,因編碼器和電動機(jī)的組裝誤差,可實(shí)現(xiàn)的停止精度存在極限。
以下是東方馬達(dá)搭載20bit編碼器的伺服電動機(jī)的實(shí)測值,可看出能實(shí)現(xiàn)高精度的定位。
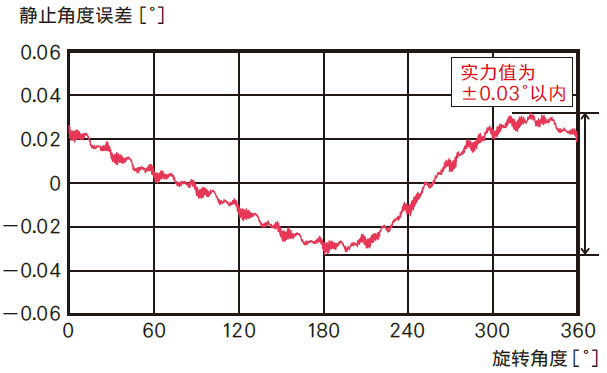
AC伺服電動機(jī)的停止精度為編碼器分辨率±1脈沖*,
但實(shí)際上因編碼器的組裝誤差,與上述值有差異。
*20比特時為1,048,576p/rev
但實(shí)際上因編碼器的組裝誤差,與上述值有差異。
*20比特時為1,048,576p/rev
注意:
本資料僅供參考。選購前請仔細(xì)確認(rèn)設(shè)備需求和產(chǎn)品規(guī)格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
本資料僅供參考。選購前請仔細(xì)確認(rèn)設(shè)備需求和產(chǎn)品規(guī)格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。
