
會員登錄/注冊



代表機構上的電動機選用示例
| ?滾珠螺桿機構 (AC小型電動機、步進電動機、伺服電動機的選用) |
?滑輪機構 (AC小型電動機、超低速同步電動機、無刷電動機) |
| ?分度盤機構(步進電動機)
|
?卷取機構(力矩電動機)
|
|
|
滑輪機構(AC小型電動機、超低速同步電動機、無刷電動機) |

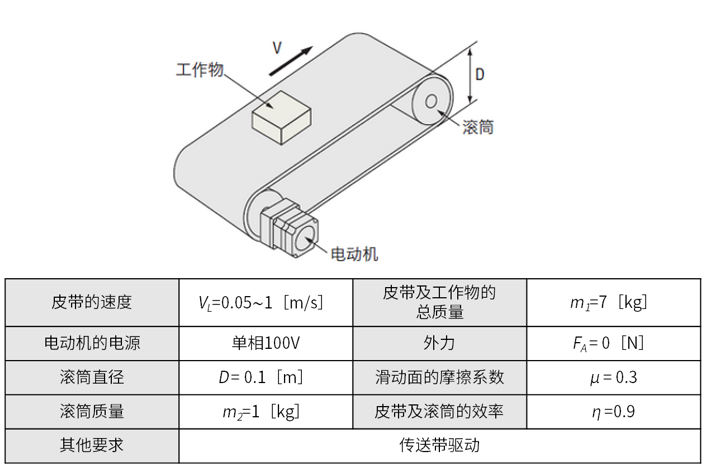
(1)驅動機構部的規格及運行條件
此為在傳送帶驅動上使用感應電動機時的選用例。須按下述要求規格來選用電動機。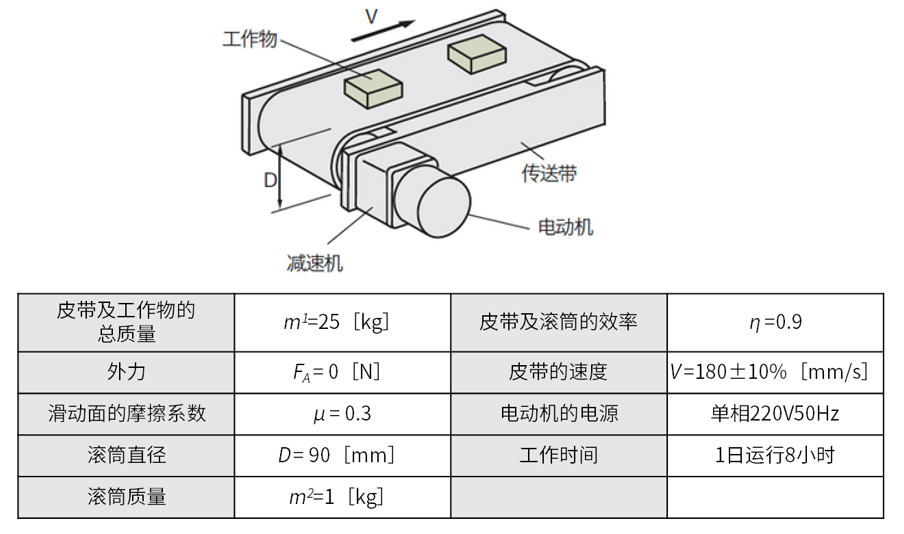
(2)確定減速機的減速比

減速機輸出軸轉速 感應電動機(4極型)在50Hz下額定轉速為1200∼1300[r/min],請在此范圍內選擇減速機的減速比。

據此,選擇減速比為 i=36。
(3)必要轉矩TM[N·m]的計算
考慮安全系數Sf=2

以之前的計算結果(減速比i=36、負載轉矩TL=7.36[N·m])為條件,選擇滿足額定轉矩的電動機。 在此請參照電動機規格表,暫時選用電動機5IK40GN-AW2J,減速機5GN36KF。
通過將負載轉矩換算為電動機出力軸的值,算出必要轉矩TM。

選定的5IK40GN-AW2J的起動轉矩為200[mN·m],無法滿足必要轉矩。
因此,將電動機更改為大一號的5IK60GE-AW2J,減速機則變更為5GE36S。在此情況下,公式為:

5IK60GE-AW2J的啟動轉矩為320[mN·m],必要轉矩為310[mN·m],能夠滿足需求。
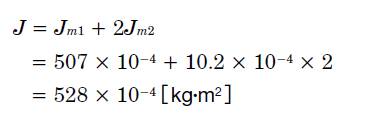
(4)轉動慣量J[kg·m2]的確認
求出減速機輸出軸的轉動慣量J。
考慮有兩個滾筒(Jm2)。
此處減速比為36的減速機5GE36S的容許轉動慣量JG,使用以下數值。
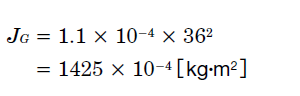
因J<JG,即轉動慣量為容許值以下,故可以使用。由于所選用的電動機額定轉矩為490[mN·m],比實際負載轉矩大,因此電動機能以比額定轉速更快的轉速運行。
再依據空載時的轉速(約1470r/min)來計算皮帶速度,確認所選用產品是否符合規格要求。

以上確認結果均能滿足規格要求。
因此,選用電動機5IK60GE-AW2J,減速機5GE36S。

(1)驅動機構部的規格及運行條件
圖1的皮帶驅動工作臺按圖2所示運行模式驅動時,請選用SMK237A-A可驅動工作物的質量。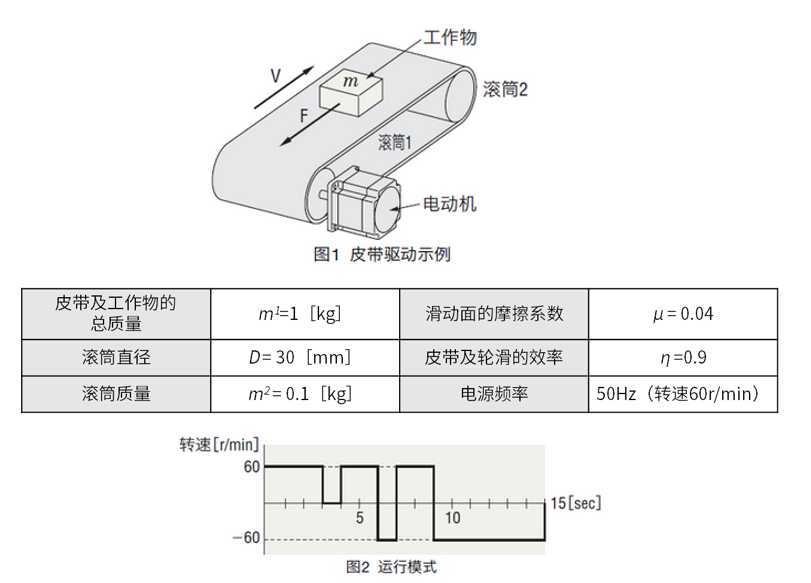
由于超低速同步電動機與2相步進電動機基本原理相同,因此可用與后者相同的方法計算轉矩。
(2)皮帶的速度V[mm/s]
請確認皮帶(工作物)的速度。

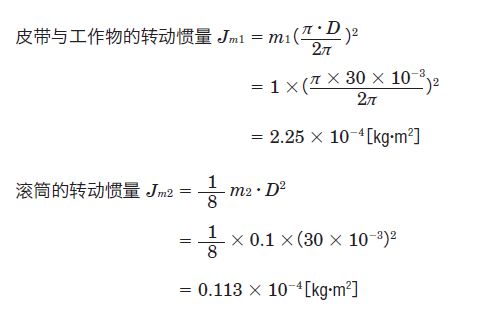
求得轉動慣量JL。
考慮有兩個滾筒(Jm2)。

AZM66AC的慣性比在30以下,因此若為6.8,即判斷可以運行。

代入轉子轉動慣量求出必要轉矩為TM=0.362[N·m],即可得知小于輸出轉矩的值。之后,確認容許轉動慣量。(4)中求得的轉動慣量在容許轉動慣量以下,因此可使用SMK237A-A。


根據皮帶速度求出滾筒的轉速。
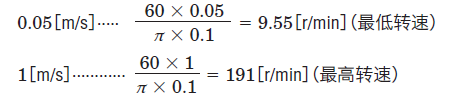
減速機的減速比請參照的輸出軸轉速表,選擇速度范圍為5.4∼266的[15],以使最低轉速與最高轉速均在速度范圍之內。
求得轉動慣量JG。
考慮有兩個滾筒(Jm2)。

依據規格表,輸出功率120W、減速比15的容許轉動慣量為225 × 10−4[kg·m2]。
參照容許轉矩表,選用輸出功率120W、減速比15的無刷電動機。
容許轉矩為5.2[N·m],因此,安全系數為 此安全系數一般在1.5∼2以上即可運行。
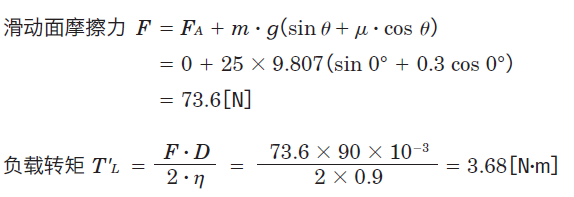
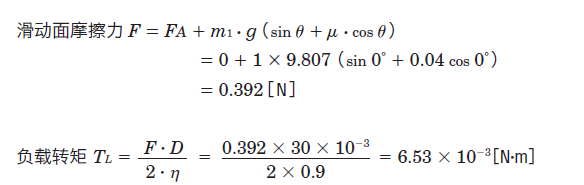
(3)負載轉矩TL[N·m]的計算
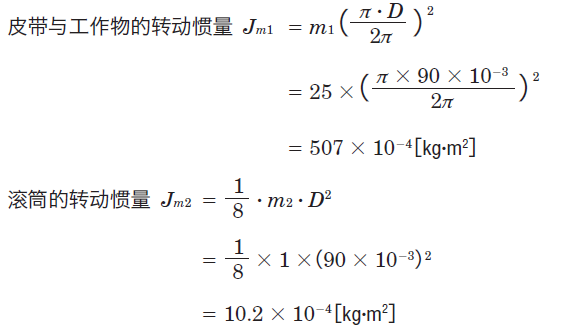
(4)轉動慣量JL[kg·m2]的計算
求得轉動慣量JL。
考慮有兩個滾筒(Jm2)。
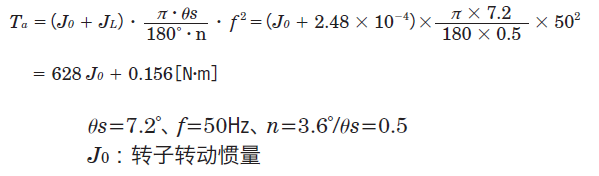
(5)加速轉矩 Ta[N·m]的計算
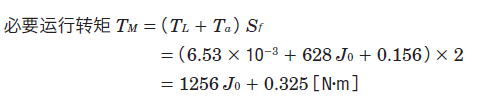
求出自起動加速轉矩。(6)必要轉矩TM[N·m]的計算(安全系數設為S f =2)
AZM66AC的慣性比在30以下,因此若為6.8,即判斷可以運行。
(7)電動機的選用
選用滿足必要運行轉矩和容許轉動慣量兩方面要求的電動機。(1)驅動機構部的規格及運行條件
如下圖所示,為了驅動傳送帶,選用無刷電動機。(2)計算所使用的轉速范圍
根據皮帶速度求出滾筒的轉速。
減速機的減速比請參照的輸出軸轉速表,選擇速度范圍為5.4∼266的[15],以使最低轉速與最高轉速均在速度范圍之內。
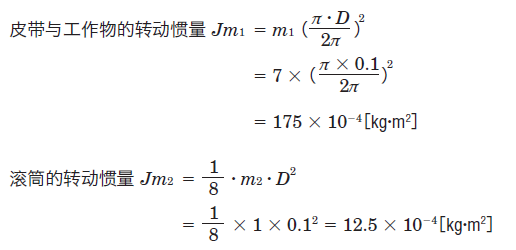
(3)轉動慣量JG[kg·m2]的計算
求得轉動慣量JG。
考慮有兩個滾筒(Jm2)。
依據規格表,輸出功率120W、減速比15的容許轉動慣量為225 × 10−4[kg·m2]。
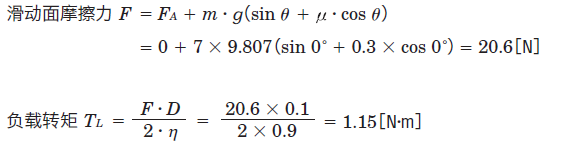
(4)負載轉矩TL[N·m]的計算
參照容許轉矩表,選用輸出功率120W、減速比15的無刷電動機。
容許轉矩為5.2[N·m],因此,安全系數為 此安全系數一般在1.5∼2以上即可運行。
注意:
本資料僅供參考。選購前請仔細確認設備需求和產品規格。
如需幫助,請洽詢本公司客戶咨詢中心(電話:400-820-6516)。